loaction
SNU Professor Yong-Lae Park's Team Develops a Miniaturized Flexible Actuator in the Form of Artificial Muscles to Enhance Stability of Heart Surgery
-
작성자
관리자
-
등록일
2020.12.31
-
조회수
532
SNU Professor Yong-Lae Park's Team Develops a Miniaturized Flexible Actuator in the Form of Artificial Muscles to Enhance Stability of Heart Surgery
- Selected as the cover paper of Soft Robotics, an international journal in the field of soft robots
- Expected to be used for highly precise and safe minimally invasive surgery,
owing to its high degree of automatic control

- Expected to be used for highly precise and safe minimally invasive surgery,
owing to its high degree of automatic control
▲ (From left) Professor Yong-Lae Park of the SNU Department of Mechanical Engineering, Cover of <Soft Robotics>
Professor Yong-Lae Park's team of the SNU Department of Mechanical Engineering announced on November 4 of their development of a miniaturized flexible actuator in the form of artificial muscles. Through this discovery, it is expected that catheter ablation, one of many minimally invasive cardiac surgeries, will become more precise and safe, and the study was selected to be the cover paper for the prestigious international journal <Soft Robotics>.
Catheter ablation is one of the main procedures utilized for treating arrhythmia in the heart. A catheter, a thin tube, is inserted into the heart through the femoral vessel to generate RF energy to block the heart's pulse around the region of ventricular tachycardia. Although it is being widely practiced worldwide, the exertion of any force on the ablation site during the procedure that is too weak can lead to lengthy surgeries or affect nearby tissues, while a force that is too strong pose the risk of perforations in the heart.
To solve this problem, Professor Park's team has developed a miniaturized flexible actuator that can be mounted at the end of the catheter. The actuator, 1.3 to 1.8 mm in diameter and 15 mm in length, is very small in size, but it is flexible in structure, allowing it to vary in its length as easily as the movement of muscles. The pressure of saline entering the catheter tube is controlled to increase or decrease its length. This manipulation allows fine-tuning of the force applied to the contact area of the heart wall.
Furthermore, it also incorporates a flexible tactile sensor at the end of the actuator that can detect the contact force applied to the heart wall, enabling not just real-time monitoring of the contact force, but also its automatic control. Although it is still in the testing stage, if such technologies are continued to be utilized, it is expected that minimally invasive surgeries of various parts of the body will be possible in a much safer and more precise way in the future.
"The results of this study were possible because the soft robot technology, which has a flexible structure and can easily move, was implemented in a highly miniaturized scale. We further plan to put in our efforts to improve the accuracy and speed during the development of such robots," said Professor Park.
The research work of Professor Park's team, which was conducted jointly with Carnegie Mellon University and the University of Pittsburgh Medical Center, was selected to be the cover paper in the October issue of Soft Robotics, an international journal in the field of soft robots. The research study was titled: 'Soft Miniaturized Actuation and Sensing Units for Dynamic Force Control of Cardiac Ablation Catheters'.
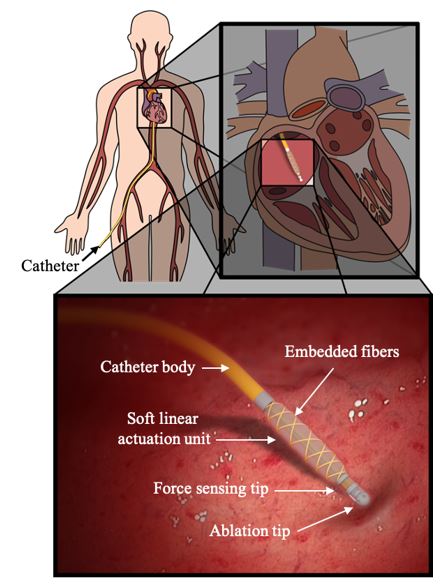
▲ Conceptual design of cardiac ablation catheter integrated with soft actuation and sensing unit for dynamic force control.
[Reference Material]
Research Paper: https://www.liebertpub.com/doi/10.1089/soro.2019.0011
N. Kumar, J. Wirekoh, S. Saba, C. N. Riviere, and Y.-L. Park, “Soft Miniaturized Actuation and Sensing Units for Dynamic Force Control of Cardiac Ablation Catheters,” Soft Robotics, 2020.