loaction
공대뉴스광장
SF 영화 속 슬라임 로봇이 현실로…서울공대 기계공학부 김호영-재료공학부 선정윤 교수팀, 마음대로 형태 바꾸고 스스로 치유하는 차세대 인공근육 개발
-
작성자
대외협력실
-
등록일
2026.03.25
-
조회수
382
SF 영화 속 슬라임 로봇이 현실로…
서울공대 기계공학부 김호영-재료공학부 선정윤 교수팀,
마음대로 형태 바꾸고 스스로 치유하는 차세대 인공근육 개발
- 액체와 고체 넘나드는 '상전이 자성 유체 전극' 세계 최초 구현
- 고장 시 회수해 재사용 가능… '지속가능한' 소프트 로보틱스 패러다임 제시
- 세계 최고 권위 학술지 Science Advances 논문 게재 
▲ (왼쪽부터) 서울대학교 이윤혁 박사, 문승원 박사과정생, 이민규 박사, 서울대학교 기계공학부 김호영 교수, 서울대학교 재료공학부 선정윤 교수
한 번 만들어지면 정해진 기능만 수행하던 기존 로봇의 굴레를 벗어나, 필요에 따라 실시간으로 형태를 바꾸고, 망가져도 스스로 복구되며 재사용까지 가능한 차세대 인공 근육이 세계 최초로 개발됐다.
서울대학교 공과대학은 재료공학부 선정윤 교수와 기계공학부 김호영 교수의 공동 연구팀(제1 저자: 이윤혁, 문승원, 이민규 연구원)이 상온에서는 고체로 존재하다가 특정 온도나 자기장 등 외부 자극에 반응하면 액체처럼 유연하고 자유롭게 움직이는 '상전이 자성 유체(Phase-transitional ferrofluid, PTF)'를 활용하여 신개념 유전 탄성체 액추에이터(DEA)를 개발했다고 밝혔다.
이번 연구성과는 세계 최고 권위의 학술지 ‘사이언스 어드밴시스(Science Advances)’에 지난 3월 21일 게재됐다.
■ 연구 배경
유전 탄성체 액추에이터(DEA)는 전기 에너지를 기계적 움직임으로 변환하는 소프트 트랜스듀서(transducer)로, 인간의 근육처럼 빠르고 정밀하게 움직일 수 있어 인공 근육으로 불린다.
유전 탄성체 기반의 기존 인공 근육은 부드럽고 가벼운 특성을 바탕으로 스마트 기기나 웨어러블 기기의 햅틱(촉각) 진동 장치, 혹은 부서지기 쉬운 과일이나 부품을 안전하게 집어 옮기는 산업용 소프트 그리퍼 등으로 응용되며 우리 일상과 산업 현장에 점차 다가오고 있다.
그러나 이러한 기존 인공 근육은 한 번 전극을 디자인해 인쇄하고 나면 그 형태가 영구적으로 고정되기 때문에, 최초 설계된 단일한 동작만 수행할 수 있다는 치명적인 한계가 있었다.
이 때문에 로봇이 다른 형태의 물건을 쥐거나 새로운 환경에 맞춰 동작을 바꿔야 할 때마다, 산업계와 학계는 새 목적에 맞는 전극 패턴을 가진 로봇을 매번 처음부터 새로 제작해야 했다. 이는 막대한 제조 비용과 시간 낭비로 이어졌으며, 일상 생활에서 다목적으로 유연하게 활용할 수 있는 '만능 소프트 로봇'의 상용화를 가로막는 가장 높은 장벽이었다.
■ 연구 성과
이 문제의 해결에 나선 공동 연구팀은 필요에 따라 전극의 형태를 실시간으로 바꿔 새로운 기능을 수행하고, 찢기거나 전기적 단락이 발생해도 스스로 복구하는 차세대 소프트 젤 액추에이터를 개발하는 데 성공했다.
새로 개발된 '상전이 자성 유체(PTF)' 전극은 필요에 따라 3차원 입체 구조로 쪼개지고 합쳐지는 동적인 재구성이 가능하다. 특히 디자인된 후에도 모양과 위치를 원하는 대로 자유롭게 바꿀 수 있기 때문에, 설계된 동작만 수행하는 기존 로봇의 기능성을 대폭 확장시킬 수 있다. 아울러 자가 치유 능력과 재활용성을 바탕으로 로봇의 지속가능성을 확보했다는 점에서 상전이 자성 유체 전극 개발의 의미가 더욱 크다는 평가다.
이번 성과의 핵심은 나노 입자와 고분자의 정교한 결합이 빚어낸 재료공학적 첨단 기술을 기계공학적 로봇 시스템으로 완벽히 구현했다는 점이다. 재료공학은 부드러우면서도 안정적으로 작동하는 상전이 전극 소재를 만들었고, 기계공학은 이 소재가 실제 구동, 재배치, 복구 과정에서 어떻게 작동하는지 보여줬다.
그 결과, 하나의 소프트 액추에이터가 상황에 따라 전혀 다른 역할을 할 수 있는 새로운 플랫폼이 탄생했다. 이는 정해진 기능만 수행하던 기존 소프트 로봇을, 환경과 목적에 따라 스스로 역할을 바꾸는 적응형 시스템으로 확장한 성과로 풀이된다.
■ 연구진 의견
선정윤 교수는 "이번 연구는 입자 및 고분자 물질 설계라는 재료공학적 혁신을 통해, 정적이고 수동적이던 전극을 '살아 움직이는 프로그래밍 요소'로 탈바꿈시킨 쾌거"라며 "스스로 치유하고 형태를 바꾸는 로봇 전극 기술은 차세대 소프트 로보틱스 생태계의 지속가능성을 열어줄 핵심 뼈대가 될 것"이라고 연구의 의의를 밝혔다.
김호영 교수는 "기계공학적 관점에서 소프트 로봇이 인간의 근육처럼 다자유도(high degrees of freedom)를 구현하려면 구조적 유연성이 필수적이었다"며 "재료공학과의 초월적 융합을 통해 단일 로봇 구조체로도 무한한 가능성의 움직임을 만들어 낼 수 있음을 증명했다"고 덧붙였다.
■ 연구진 진로
이윤혁 연구원은 서울대 재료공학부에서 박사학위를 취득한 후, 메사추세츠 공과대학(MIT)에서 박사후과정을 수행하며 나노파티클과 DNA 그리고 폴리머를 통한 새로운 플랫폼 머트리얼 개발을 주제로 연구를 지속하고 있다. 서울대 재료공학부에서 박사과정을 밟고 있는 문승원 연구원은 현재 반도체 및 전자소자용 고 열전도도 폴리머 소재 개발 관련 연구를 수행 중이다. 이민규 연구원은 서울대학교 재료공학부에서 박사학위 취득 후, 현재 삼성전자 반도체연구소에서 차세대 고대역폭 메모리(HBM) 개발 업무를 수행하고 있다.
한편 이번 연구는 과학기술정보통신부와 한국연구재단이 추진하는 중견연구자지원사업, 미래개척융합과학기술개발사업, 리더연구자지원사업의 지원으로 수행됐다.
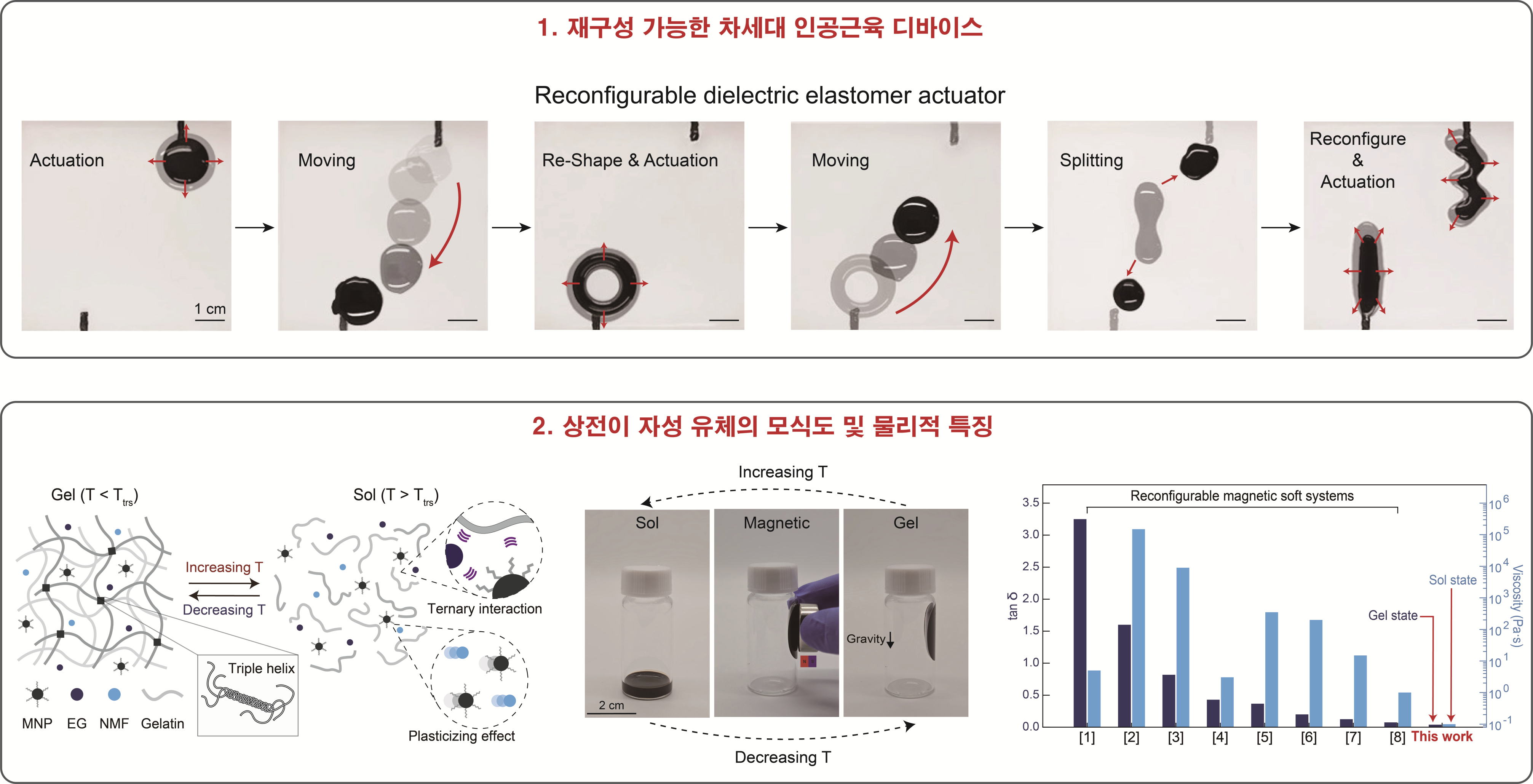
▲ 그림 1. 재구성 가능한 차세대 인공 근육 디바이스 구동 및 활용. 상전이 자성유체의 물리적 특성.
(1) 재구성 가능한 차세대 인공 근육 디바이스. 슬라임과 같은 상전이 자성 유체 전극의 반복적인 상전이 및 자기 반응성을 통해 다양한 기능을 수행할 수 있다.
(2) 상전이 자성유체의 모식도 및 물리적 특징. 고체와 액체를 번갈아 가며 상변이하는 특성을 이용해 자기 반응성을 지닌 다양한 재료 중, 높은 탄성률 및 낮은 점도를 하나의 재료에 구현했다. 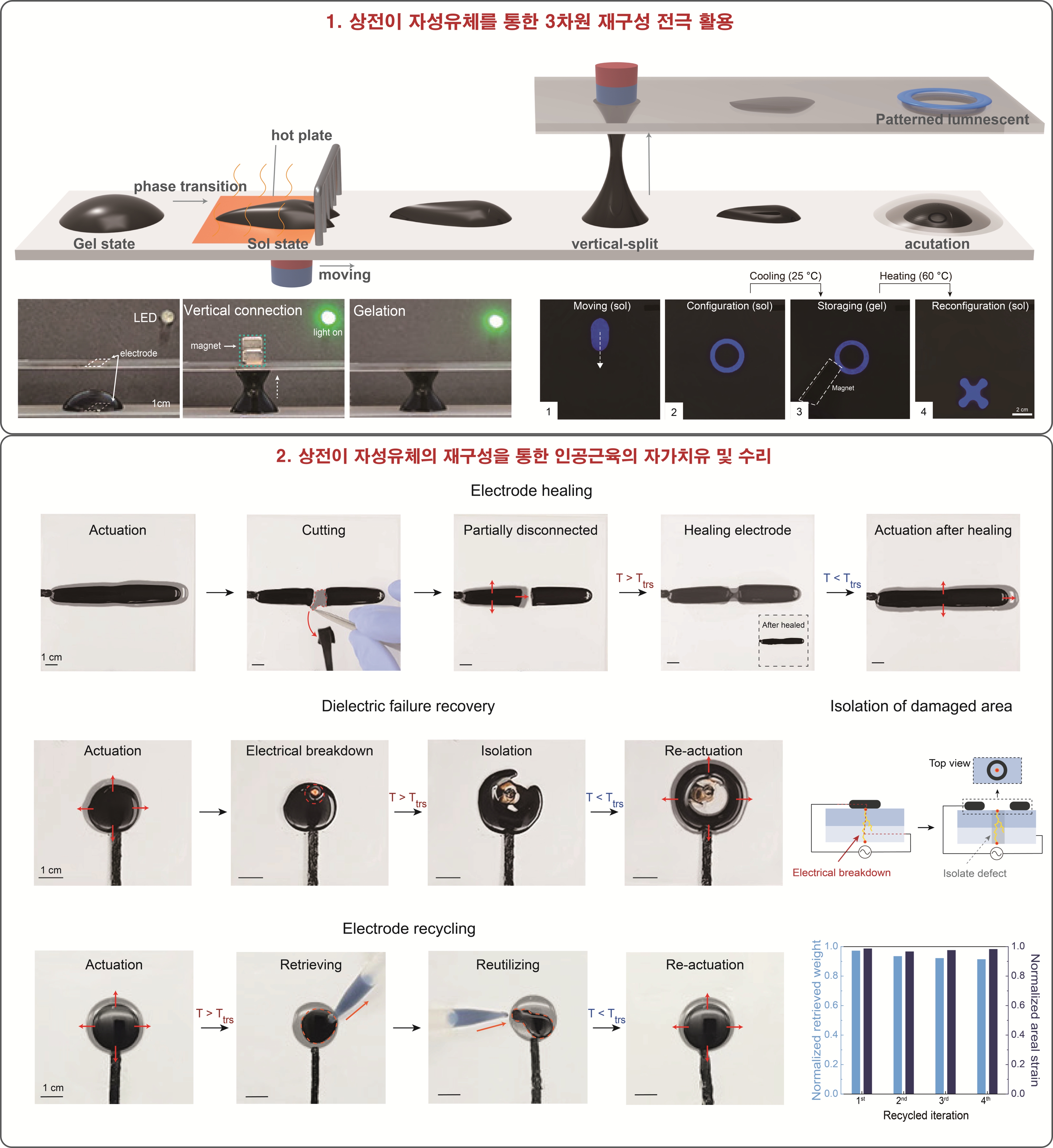
▲ 그림 2. 상전이 자성 유체를 활용해 재구성 전극 및 인공 근육 디바이스의 기능성 확장
(1) 상전이 자성유체 전극을 통한 3차원 재구성 전극 활용. 상전이 자성 유체 전극을 통해 3차원으로 확장된 차세대 인공 근육 디바이스와 자유롭게 재구성 가능한 디스플레이를 구현할 수 있다.
(2) 상전이 자성유체의 재구성을 통한 인공 근육의 자가치유 및 수리. 전극의 절단 및 인공 근육 손상이 발생하더라도 원상태로 구동을 할 수 있고 모든 쓰임이 끝나면 다시 회수하여 디바이스의 지속가능성을 높인다.
[참고자료]
- 논문/저널명 : A reconfigurable dielectric elastomer actuator via phase-transitional ferrofluid enables sustainable operation, Science Advances
- DOI : https://www.science.org/doi/10.1126/sciadv.aeb7409
[문의]
서울대학교 신소재공동연구소 이윤혁 연구원 / wntkd96@snu.ac.kr
담당부서대외협력실
전화번호880-9148