loaction
공대뉴스광장
서울대 공대 기계공학부 조규진 교수 연구팀, 사람처럼 여러 물체 파지해 운반 시간 단축하는 로봇 그리퍼 개발
-
작성자
대외협력실
-
등록일
2024.12.11.
-
조회수
3523
서울대 공대 기계공학부 조규진 교수 연구팀, 사람처럼 여러 물체 파지해 운반 시간 단축하는 로봇 그리퍼 개발
- 여러 물체 하나씩 집어 한 번에 옮기는 다물체 파지 그리퍼 구현
- 물류 및 제조 공정 적용 시 효율성 향상 기대돼
▲ (좌측부터) 유성렬 박사과정생(제2저자), 엄재민 박사과정생(제1저자), 조규진 교수(지도교수), 이윤서 학부 연구원(공동 저자), 박정훈 석사과정생(공동 저자)
서울대학교 공과대학은 기계공학부 조규진 교수(인간중심 소프트 로봇기술 연구센터장) 연구팀이 효율적인 픽 앤 플레이스(pick-and-place) 작업을 위해 사람처럼 여러 물체를 한 번에 옮길 수 있는 로봇 그리퍼를 개발했다고 밝혔다.
이 기술은 물체를 동시에 옮길 뿐만 아니라 원하는 위치에 정렬할 수 있는 기능까지 구현했기 때문에 비정형 환경에서도 활용 가능성이 크다. 사람의 손동작 원리를 분석해 로봇 그리퍼에 성공적으로 적용한 사례인 이번 연구 성과는 12월 12일 로봇 분야의 저명한 국제 학술지 ‘사이언스 로보틱스(Science Robotics)’에 게재돼 학계의 주목을 받았다.
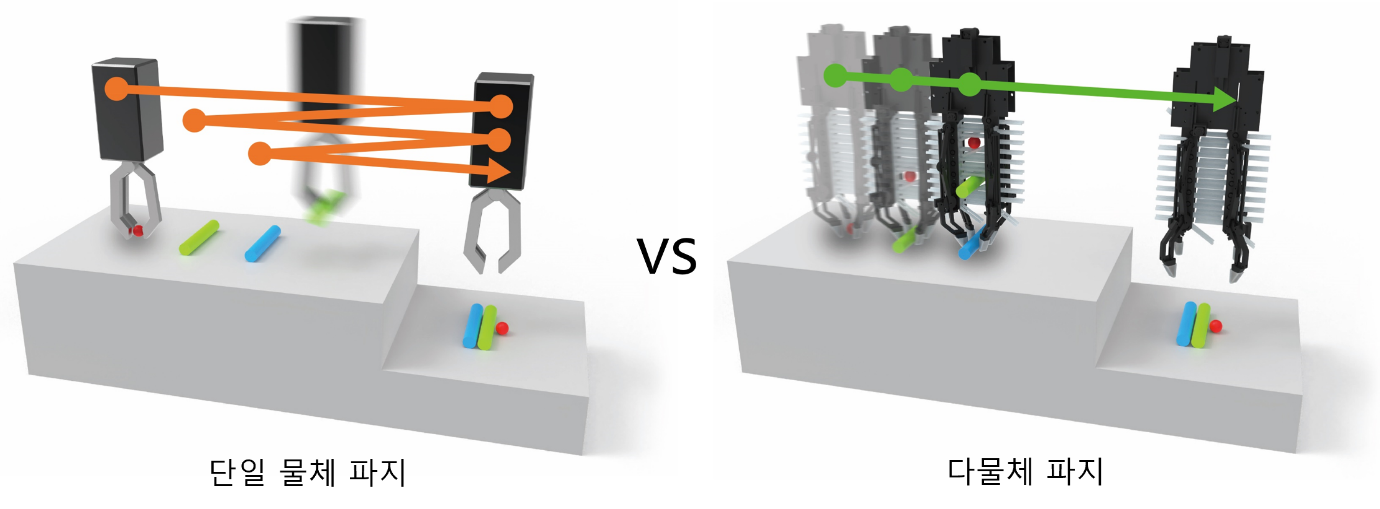
▲ (자료1) 기존 그리퍼의 단일 물체 파지 방법과 개발된 다물체 파지 방법 비교 : 단일 물체 파지 방법에 비해 다물체 파지 방법은 픽 앤 플레이스에 필요한 로봇팔의 이동 거리를 효율적으로 줄일 수 있으며, 이에 따라 전체 공정 시간도 줄일 수 있다.
연구의 출발점은 ‘다물체 파지(multi-object grasping)’로 불리는 사람의 파지 방법이었다. 연구팀은 2019년 공장에서 작업자들이 효율적 작업을 위해 물체를 하나씩 옮기지 않고, 여러 개를 동시에 옮기는 모습을 보고 영감을 얻어 연구를 시작했다. 조규진 교수는 “실제 사람의 손동작과는 다르게 기존의 그리퍼 연구들은 대부분 로봇이 한 번에 하나의 물체를 옮긴다는 가정 하에 발전해왔다”면서 “한 번에 여러 물체를 옮기는 ‘다물체 파지 그리퍼’도 개발된 바 있지만, 여러 개의 작은 그리퍼들을 로봇팔 끝단에 배치한 형태라 정형화된 환경에서만 사용이 가능하다는 한계가 있었다”고 밝혔다.
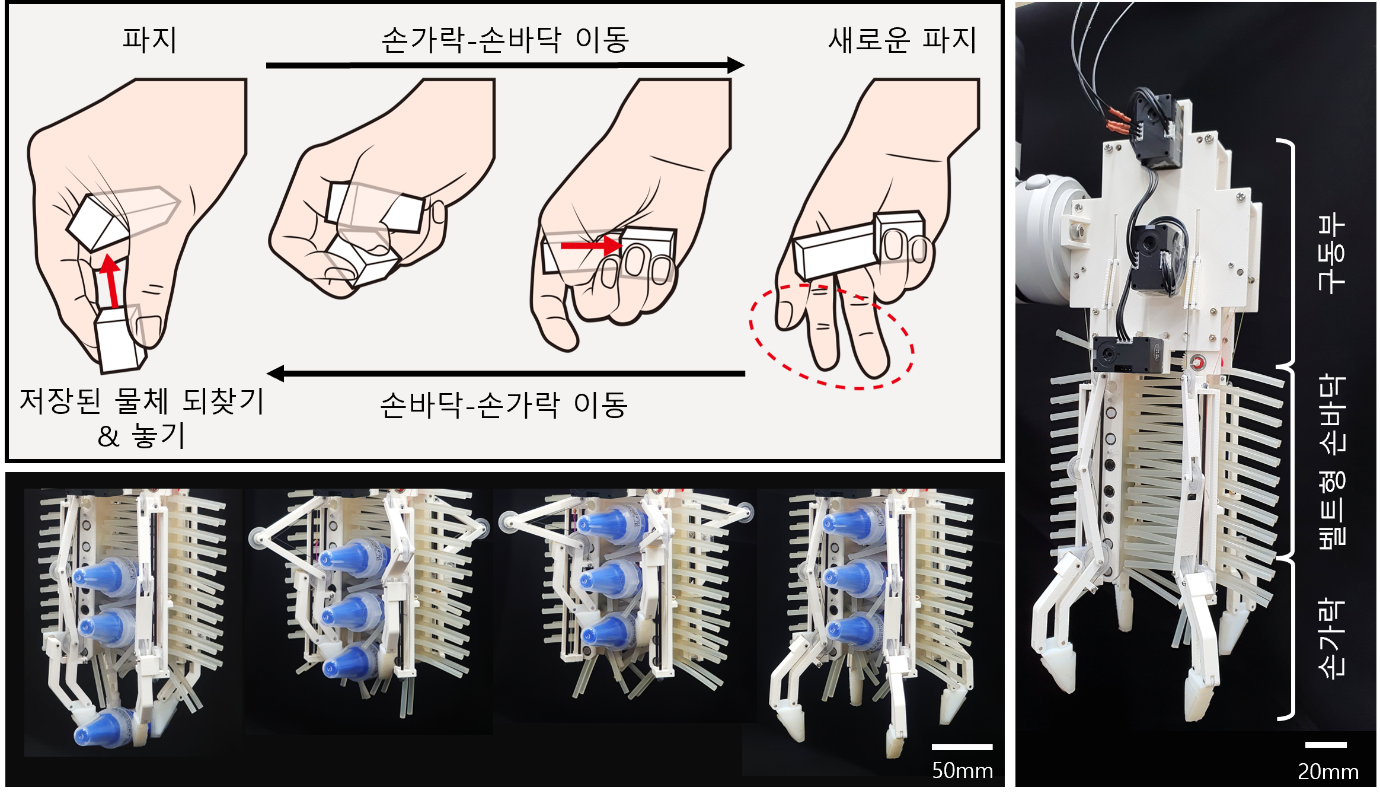
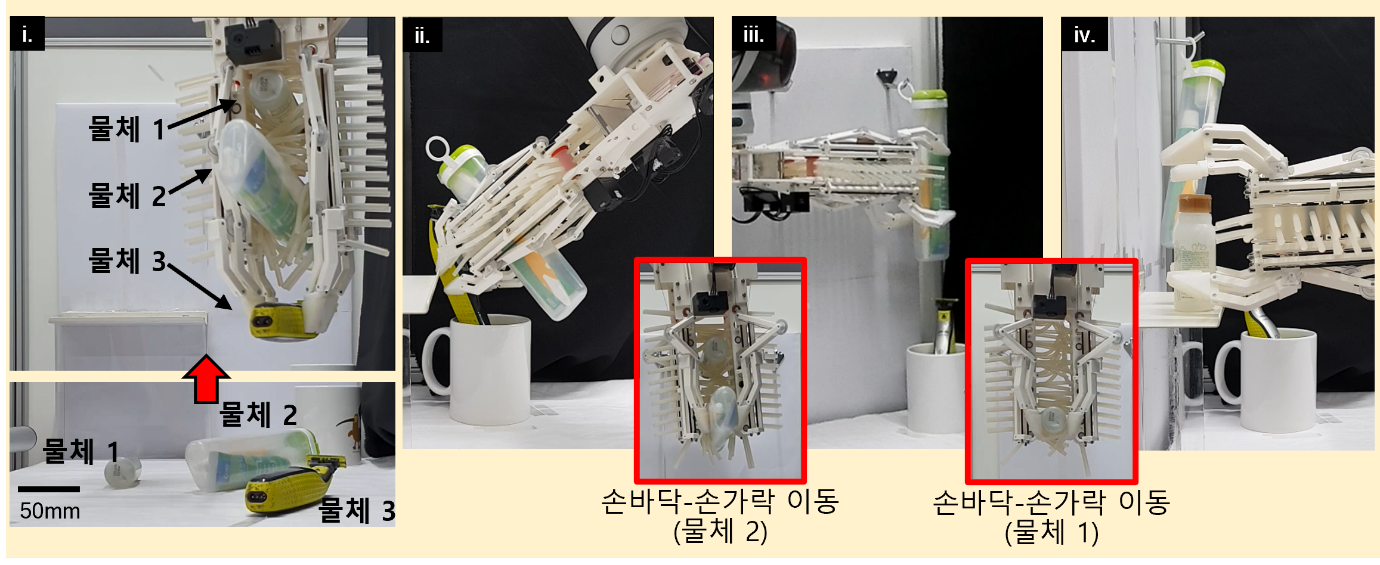
▲ (자료2) 사람의 다물체 파지 동작과 개발된 그리퍼 : 사람은 손가락-손바닥 이동 동작을 통해 물체를 하나씩 집는 것을 반복하여 여러 물체를 한번에 저장할 수 있으며, 물체를 옮긴 후 손바닥-손가락 이동 동작을 통해 저장된 물체를 하나씩 꺼내 놓을 수 있다. 서울대 연구진은 이 동작에 착안하여 비정형 환경에서 다물체 파지가 가능한 그리퍼를 제안했다.
이러한 제약에 문제의식을 가진 연구팀은 비정형 환경에서도 그리퍼 활용이 가능하도록 사람의 다물체 파지 전략을 분석해 이를 적용한 로봇 그리퍼를 세계 최초로 개발했다. 이 과정에서 핵심이 된 동작은 ‘손가락-손바닥 이동 동작(finger-to-palm translation)’과 ‘손바닥-손가락 이동 동작(palm-to-finger translation)’이다. 예를 들어 사람들은 책상 위에 놓인 여러 물체를 손바닥에 모으기 위해 손가락으로 물체를 하나씩 잡고, 손바닥으로 옮기는 과정을 반복한다. 그리고 모은 물체들을 식탁 위로 함께 옮긴 후, 다시 손가락으로 하나씩 잡아 원하는 위치에 배치할 수 있다. 연구팀은 이 동작 원리를 로봇에 도입해, 물체를 하나씩 잡아 저장하고 여러 물체를 한 번에 옮긴 뒤, 다시 개별적으로 원하는 위치에 정렬할 수 있는 로봇 그리퍼를 개발한 것이다. 이를 구현하기 위해 그리퍼의 손가락에 디커플링 링크(decoupling link)를 설치함으로써 물체를 파지하고 손바닥으로 전달하는 동작을 기구학적으로 분리해 제어를 간단히 했다. 그리퍼의 손바닥은 유연한 털이 배열된 벨트형 구조로, 물체를 안정적으로 저장하며 다양한 크기의 물체를 동시에 처리할 수 있도록 설계됐다. 이와 같이 독특한 하드웨어 설계를 통해 연구진은 사람의 복잡한 움직임을 로봇에 맞게 간단화시킨 후 적용했으며, 총 3개의 모터만으로 모든 움직임을 구현하는 데 성공했다.
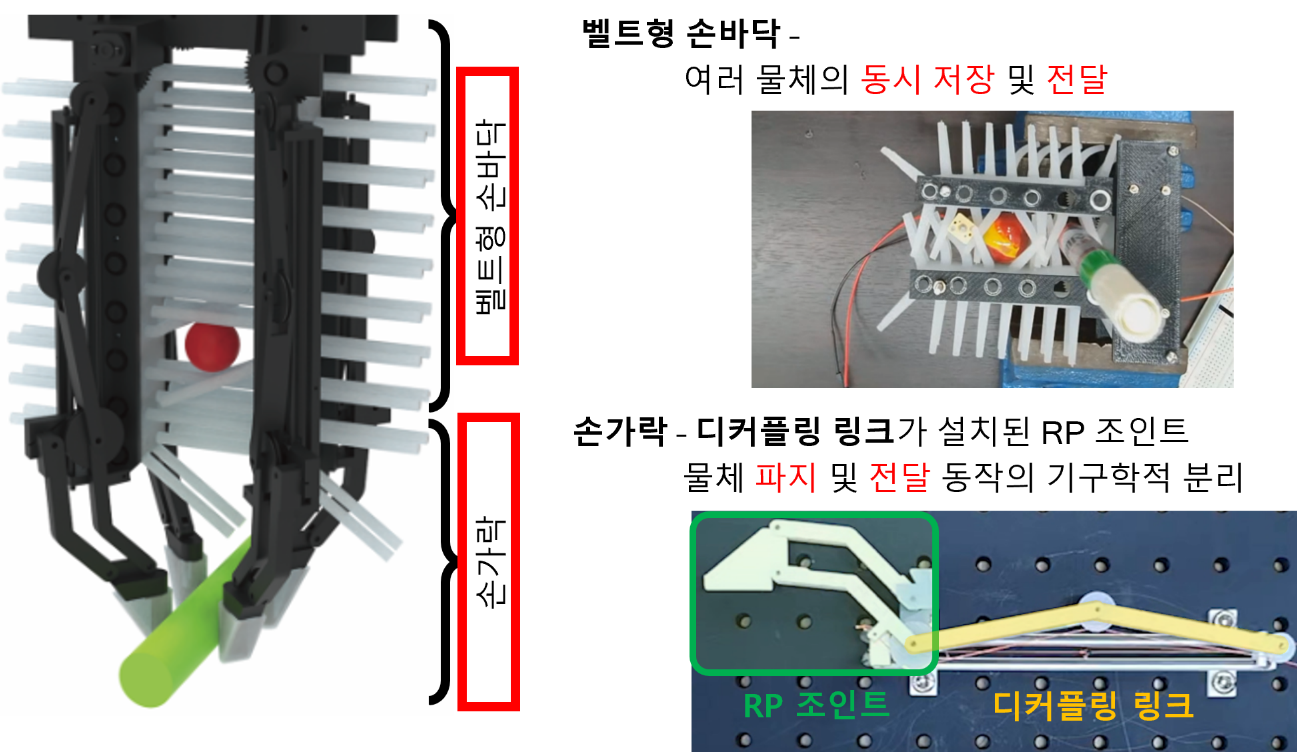
▲ (자료3) 개발된 모그립(MOGrip)의 디자인 : 개발된 그리퍼는 4개의 손가락과 벨트형 손바닥으로 구성된다. 벨트형 손바닥은 털이 표면에 배치된 두 개의 컨베이어 벨트로 구성되며, 여러 물체를 동시에 저장할 수 있다. 손가락은 물체의 파지 및 전달을 담당하며, 2개의 디커플링 링크를 통해 두 동작을 분리하여 간편한 제어로도 물체를 파지하고 손바닥으로 전달할 수 있다.
연구진은 실험실 스케일의 데모를 통해 이번에 개발된 그리퍼가 다양한 비정형 환경에서 적용될 수 있음을 검증했다. 먼저 물류 환경에서 그리퍼가 선반에 놓인 8개의 물체를 2번의 왕복 운동으로 옮길 수 있고, 이때 물체를 하나씩 옮기는 단일 물체 파지 방식과 대비해 공정 시간을 34% 절감, 로봇팔의 이동 거리를 71% 단축할 수 있다는 사실을 확인했다. 또한 가정 환경에서는 책상에 놓인 물체들을 모두 저장한 뒤, 원하는 위치에 하나씩 놓을 수 있음을 검증했다. 이처럼 연구진이 개발한 그리퍼는 물류 및 가정 환경 뿐 아니라, 대표적인 비정형 환경으로 꼽히는 빈-피킹(bin picking, 여러 물건이 컨테이너, 수납함 등의 용기에 어지럽게 쌓여 있는 공정) 공정에도 적용이 가능할 것으로 기대된다.
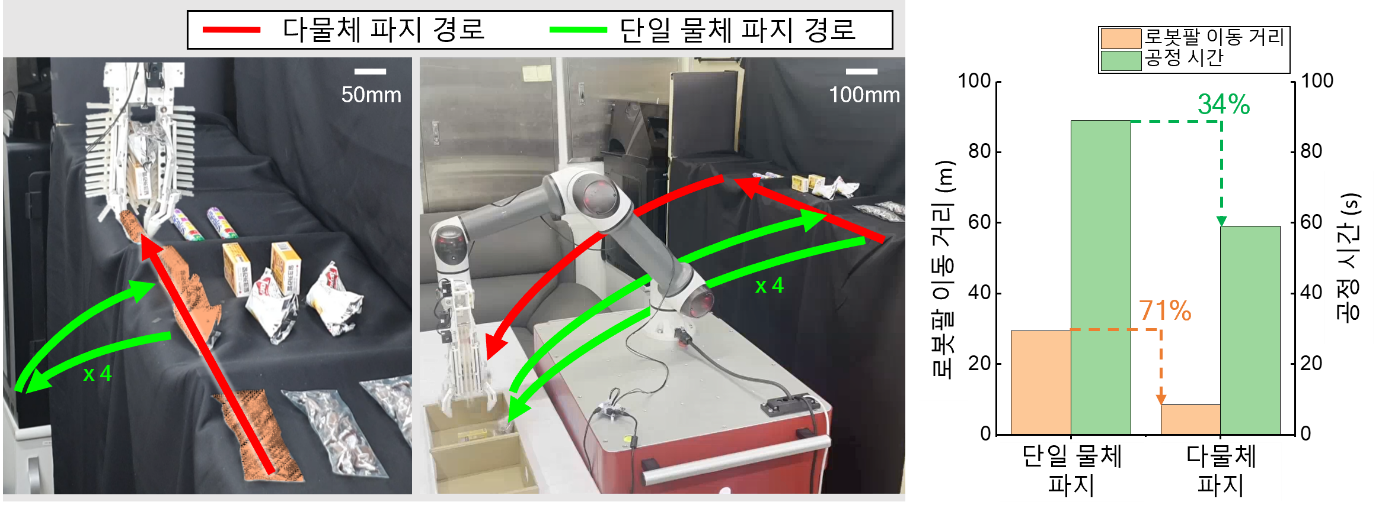
▲ (자료4) 실험실 스케일의 물류 환경에서 다물체 파지와 단일 물체 파지의 효율 비교 : 개발된 다물체 파지 방법은 기존의 단일 물체 파지 방법에 비해 공정 시간을 34%, 로봇팔의 이동 거리를 71% 단축할 수 있었다.
연구책임자인 조규진 교수는 “자연의 원리는 효율적인 로봇 동작 설계에 대한 영감을 준다”면서 “이때 단순히 자연의 동작을 모방하는 게 아니라, 핵심 원리를 로봇에 맞게 재구성하는 것이 로봇공학자의 역할”이라고 연구의 방향성을 설명했다. 또한 “사람의 다물체 파지 방법에서 손안 이동 기술은 핵심적인 움직임인데, 이번에 제안한 그리퍼는 이 원리를 최초로 로봇에 적용한 사례”라고 이번 연구의 의의를 강조하며 “물류나 가정 환경 등 다양한 비정형 환경에서 효율적인 픽 앤 플레이스를 가능케 할 것으로 기대된다”고 밝혔다.
▲ (자료5) 가정 환경 정리 데모 : 연구진은 개발된 모그립(MOGrip)을 이용하여 여러 물체를 옮긴 후, 하나씩 원하는 위치에 놓을 수 있음을 보였다.
현재 조규진 교수 연구팀은 다품종 소량생산, 빈 피킹, 물류 공정 등 자동화가 이뤄지지 않은 다양한 공정에 이 기술을 적용할 수 있는지 검토 중이며, 벨트형 손바닥의 디자인을 타겟 물체에 맞게 최적화하는 연구에 매진하고 있다. 제1저자인 엄재민 박사과정생은 내년 2월에 졸업한 뒤에 박사 후 연구원으로서 다물체 파지 그리퍼의 경로 계획(path planning)과 벨트형 손바닥의 디자인의 최적화 연구를 추가로 진행할 계획이다.

▲ (좌측부터) 서울대 기계공학부 조규진 교수(교신저자), 엄재민 박사과정생(제1저자), 유성렬 박사과정생(제2저자)
[참고자료]
● Paper
- “MOGrip: Gripper for multiobject grasping in pick-and-place tasks using translational movements of fingers”, Science Robotics
- https://www.science.org/doi/10.1126/scirobotics.ado3939
● Video (Youtube)
- Main Video: https://tinyurl.com/MOGrip-Media
- Sub Video: https://tinyurl.com/MOGrip-Sub
[문의]
서울대학교 기계공학부 조규진 교수 / 02-880-1703 / kjcho@snu.ac.kr
담당부서대외협력실
전화번호880-9148