loaction
창의설계축전 공모작
Microcontroller-based balancing control of 3D-printed quadcopter
-
참가 부문
-
학과
원자핵공학과
-
팀명
인생은 기울어도 드론은 곧게
-
신청자 이름
학생행정실
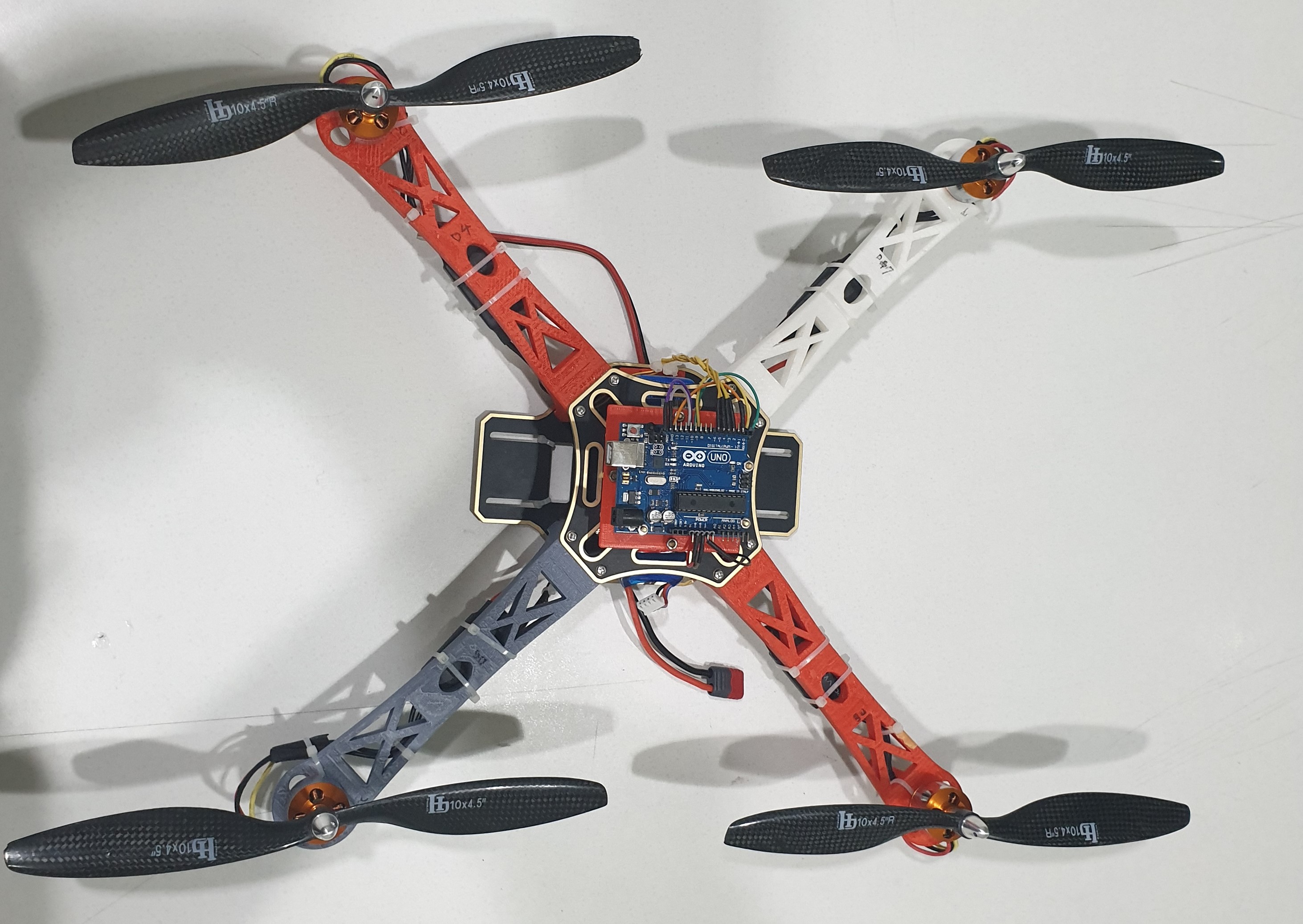
‘3D프린팅과 PID제어를 이용한 쿼드콥터의 자세제어’과제는 4차 산업혁명의 핵심기술로 손꼽히는 드론과 3D프린팅 기술을 접목하고, 이를 위한 자세제어 시스템을 구현 및 학습하는 것에 목적을 두고 있다. 이미 상용화된 기술이지만 자세제어가 가능한 드론을 직접 제작해보면서‘공학적 문제 해결 능력’을 기를 수 있다는 이점이 있다.
본 과제 수행의 과정은 크게 솔리드웍스를 이용한 프레임과 프로펠러 설계와 아두이노를 활용한 제어 알고리즘 코딩으로 나뉜다. 솔리드웍스를 이용한 설계에서는 기존의 드론 프레임을 참고해 제어부를 제외한 메인 프레임을 모델링하였으며, 여러 모양의 프로펠러를 모델링하여 디자인에 따라 추력이 얼마나 달라지는지 실험했다. 공기저항을 줄이기 위해 곡선으로 모델링했으며, 프로펠러와 모터 파손 방지를 위해 받침대를 제작하였다. 아두이노 프로그램을 활용한 드론 제어 알고리즘 코딩 과정에서는 자이로 센서, 가속도 센서를 사용하여 얻은 가속도 3축과 각속도 3축, 총 6개 축의 데이터를 바탕으로 드론의 자세를 측정하는 서로 다른 두 가지 방식(Digital Motion Process, Complementary Filter)의 장단점을 실험했다. 측정된 Yaw, Pitch, Roll 데이터를 바탕으로 PID제어를 이용해 4개 모터의 출력값을 결정했다.
본 과제의 첫 번째 효과는 드론 제작에서의 신속한 수정과 설계의 유연성이다. 비교적 접근이 쉬운 아두이노 보드를 사용해 직접 코딩했기 때문에, 날개나 프레임, 재질 등이 바뀌어도 손쉽게 수정하고 제어할 수 있다. 또한 3D 프린팅을 활용하기에 손상된 부품교체나 목적에 따른 유연한 설계에 용이하다. 두 번째, 본 과제의 내용은 학생들을 위한 교육용 키트로 활용될 수 있다. 위와 같은 코드와 부품들을 학생들을 위한 아두이노 교육용 키트로 판매한다면, 꾸준히 활성화되고 있는 코딩 교육 시장과 소수의 관련 업체에 비추어 봤을 때, 현시점에서 우수한 시장성을 지닌 아이템이 될 것이다.
담당부서학생행정실
전화번호880-2277