loaction
창의설계축전 공모작
자기유변탄성체를 기반재료로 한 체내 무선 제어 소프트 로봇 개발
-
참가 부문
-
학과
재료공학부
-
팀명
머털도사(Material Master)
-
신청자 이름
학생행정실
최근 micro size의 다양한 soft robot이 연구 및 개발되고 있지만, 대부분 단순히 운동성을 부여하는 데에 그쳤으며, 복잡한 작업을 수행할 수 있는 soft robot에 대한 연구는 많지 않았다. 따라서 본 과제에서는 특수한 기능을 수행할 수 있는 soft robot을 설계 및 제작하고, 이를 바탕으로 더욱 정교한 robot의 제작 가능성을 보이는 것을 목표로 설정하였다. 무선 조종이 가능하고 인체에 무해한 구동 방식인 자기장을 이용하기 위하여, micro size의 자성 입자인 Fe3O4를 Silicone에 혼합시키는 방식으로 soft robot을 제작하였으며, 음의 푸아송비를 갖는 auxetic 구조를 채택하여 한 방향의 자기장만으로 여러 방향의 변형이 가능해지도록 설계하였다.
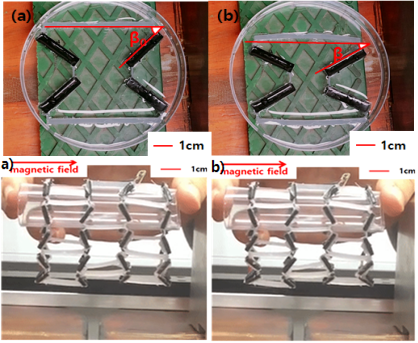
우선 2차원의 auxetic 구조 soft robot에 자기장을 가했을 때 발생하는 토크를 계산하여 MATLAB 시뮬레이션을 진행하였다. 그 결과, 구조 내의 hinge 두께 및 Fe3O4 particle 농도에 따라 변형 정도가 달라짐을 확인하였고, 실제 제작한 2차원 soft robot을 통한 실험에서도 동일한 결과가 나타남을 알 수 있었다. 또한, 2D auxetic 구조를 길게 제작한 후 이를 마는 형태로 원통형 soft robot을 제작하였으며, 축 방향 외부자기장을 가함으로써 soft robot의 부피 변화가 나타남을 확인할 수 있었다.
본 과제는 자기유변탄성체를 이용한 의료용 soft robot의 제작 가능성을 제시하고 있다. Stereolithography 및 photopolymerization 기술을 도입하면 더욱 작고 정교한 soft robot을 제작할 수 있으며, 이러한 soft robot에 외부자기장을 가함으로써 체내에서 세밀한 동작을 수행하도록 할 수 있다. 이러한 기술은 혈관 내 스텐트 기능, 혈관 폐쇄를 통한 출혈 방지, 암종의 성장 억제 시술 등 다양한 의료 분야에 활용될 수 있을 것으로 기대된다.
담당부서학생행정실
전화번호880-2277