loaction
창의설계축전 공모작
제작물
-
참가 부문
-
학과
전기·정보공학부
-
팀명
사령탑
-
신청자 이름
서성민
자율주행 기술은 여러 면에서 각광받고 있지만 자폭 테러 등 새로운 형태의 범죄를 낳을 수 있다는 우려도 존재한다. 한편, 범죄 방지 분야에서도 자율주행 경찰차 등이 여러 임무 수행을 할 수 있으리라고 예상된다. 따라서 가까운 미래에 도래할 자율주행 시대에서는 자율주행 경찰차가 범죄자에게 악용당하는 자율주행 차량 등의 도망치는 목표물을 추격할 상황이 발생할 수 있다. 특히 도심 환경은 수많은 시설과 사람들이 밀접한 공간이기에 위협이 될 수 있는 요소를 정확하게 추적하는 것이 중요하다.
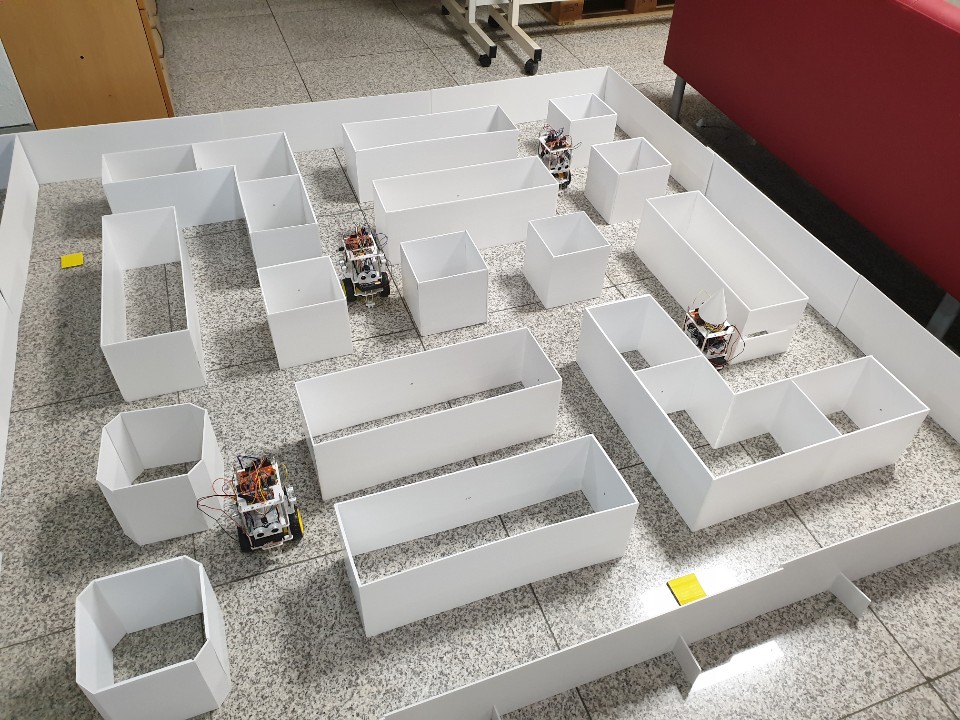
우리 팀은 이러한 상황 중 여러 건물과 그 사이의 길이 존재하는 도심 환경에서 추적을 피해 도망치는 유인/무인 차량을 무인 로봇들이 협동하여 추적할 수 있는 알고리즘을 만들고, 모형 도시와 아두이노를 이용한 로봇으로 직접 시뮬레이션을 하여 알고리즘의 효용성을 시험하였다. 이 작품은 블록과 길로 이루어진 모형 도시 공간에서, 추적 로봇 3대가 자신들보다 속력이 더 빠른, 임의로 정해진 4개의 출구 중 하나를 찾아 도망치는 로봇 1대를 쫓아가는 시뮬레이션을 진행한다. 시뮬레이션은 도망치는 로봇이 정해진 출구에 도착하거나 추적 로봇이 도망치는 로봇에 충분히 가까이 도달하면 종료된다. 모든 로봇들은 1대의 컴퓨터에 연결되어 있으며, 이 컴퓨터는 정해진 알고리즘을 따라 도망자와 추적자의 위치 정보를 파악해 로봇들에게 명령을 내린다. 이러한 명령 구조는 실제 상황에서 추적 센서 등을 통해 도망치는 로봇의 위치를 파악할 수 있고 추적 로봇이 메인 컴퓨터와 서로 정보 교환할 수 있다고 가정한 것이다.
이러한 시스템은 아직 추상적인 단계이지만, 자율주행 시대에 더 빈번하게 발생할 목표물 추적 상황에서 지금까지 비교적 덜 연구된, 도심 환경에서 여러 대의 로봇이 협동하여 목표물을 추적하는 방식을 새롭게 제시하여 향후 진행될 연구들의 방향성에 도움을 줄 수 있을 것으로 예상된다.
담당부서학생행정실
전화번호880-2277