loaction
창의설계축전 공모작
개발도상국 내수면 부유 쓰레기 처리 시스템 : 쓰레기 수거 로봇과 스테이션의 개발
-
참가 부문
-
학과
기계항공공학부
-
팀명
PoS
-
신청자 이름
안정민
전 세계의 강과 호수 중 부유 쓰레기로 인해 오염된 곳은 다수 존재하지만 인간이 직접 들어가서 이를 처리하는 것은 유해물질로 인해 위험하므로 사람이 물에 직접 닿지 않고 쓰레기를 처리하는 방안이 필요하다. 현재 부유 쓰레기 수거를 위해 ‘솔라 히어로’, ‘WasteShark’ 등이 운영 중이지만 인간의 개입이 필요하므로 본 과제에서는 인력의 투입을 최소화하며 부유 쓰레기를 처리하는 시스템의 개발을 목표로 한다.
본 과제에서는 로봇과 스테이션의 전자부 및 소프트웨어에 포함되는 Arduino, PIXY 카메라 등의 사용을 위한 코드와 알고리즘을 학습하고 시스템의 구동을 위한 코드를 작성한다. 로봇과 스테이션의 프로토타입 제작을 통하여 적합한 구조를 선정한 후 AutoCAD와 Solidworks 등의 프로그램으로 설계하여 아크릴 레이저 커팅과 3D 프린팅의 방법으로 하드웨어를 제작한다. 완성된 로봇과 스테이션으로 수조실험 과정을 거쳐 개선사항을 반영한다.
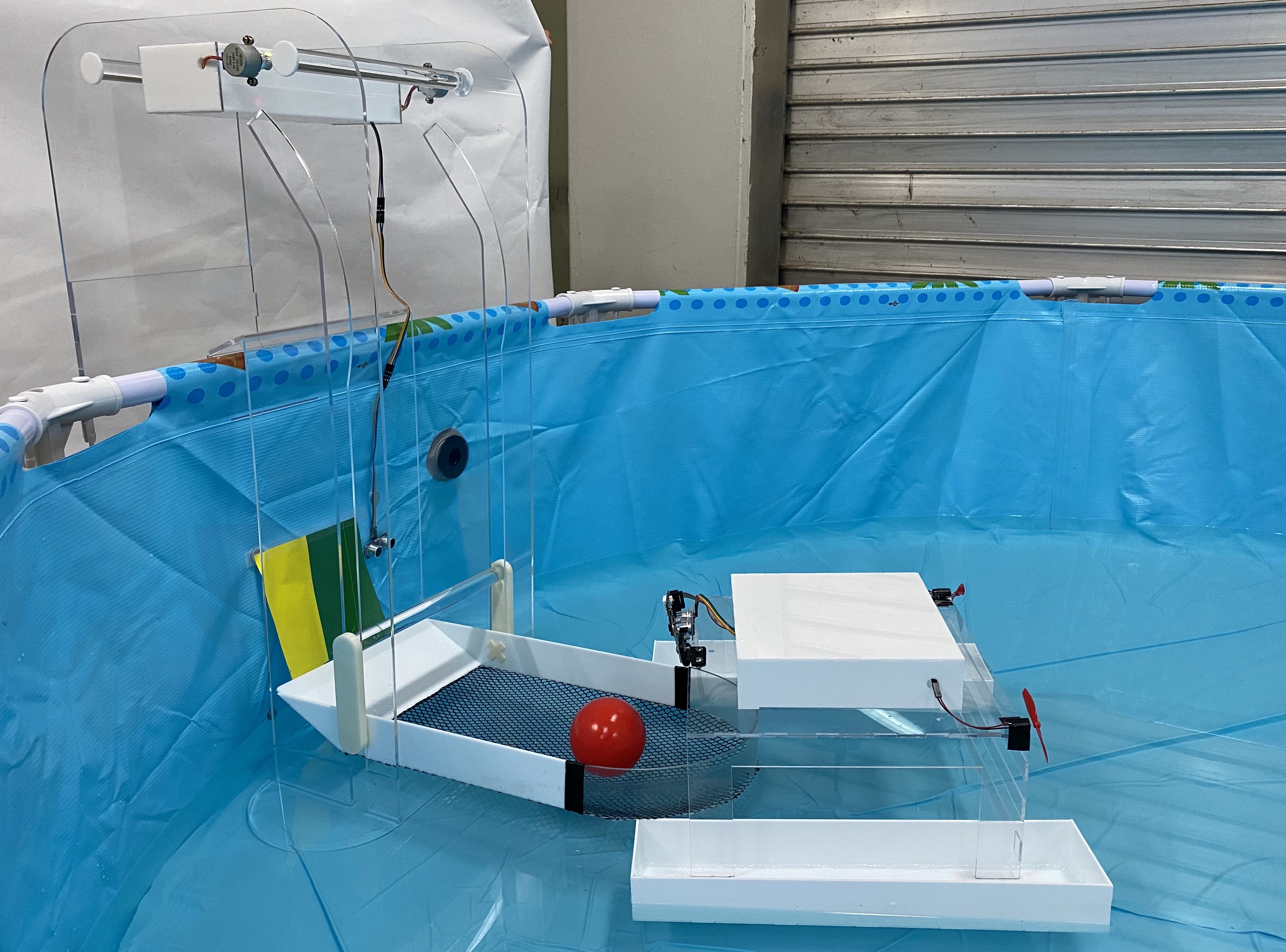
쓰레기 수거 로봇은 전자부, PIXY 카메라, 입구, 모터, 발 등의 부분으로, 스테이션은 전자부, 버킷, 수거함. 모터 등의 부분으로 구성된다. 로봇은 부유 쓰레기를 인식하여 그 위치를 파악하고 수거한다. 스테이션은 로봇으로부터 이를 전달받아 적재한다.
본 시스템은 개발도상국의 인간의 손길이 닿기 힘든 지역에서의 부유 쓰레기 수거를 목표로 하므로 수질 개선에 기여하여 지구촌 환경 보전에 공헌할 수 있을 것이다. 시범운영을 통해 개선 사항을 반영하고, 다양한 조건에 따른 연구를 진행한다면 파도가 높거나 유속이 빠른 하천이나 바다 등 다양한 환경에서의 적용이 가능할 것이다.
담당부서학생행정실
전화번호880-2277