loaction
창의설계축전 공모작
비인간형 모션을 통한 감정의 구체화
-
참가 부문
-
학과
전기·정보공학부
-
팀명
미모사
-
신청자 이름
이태윤
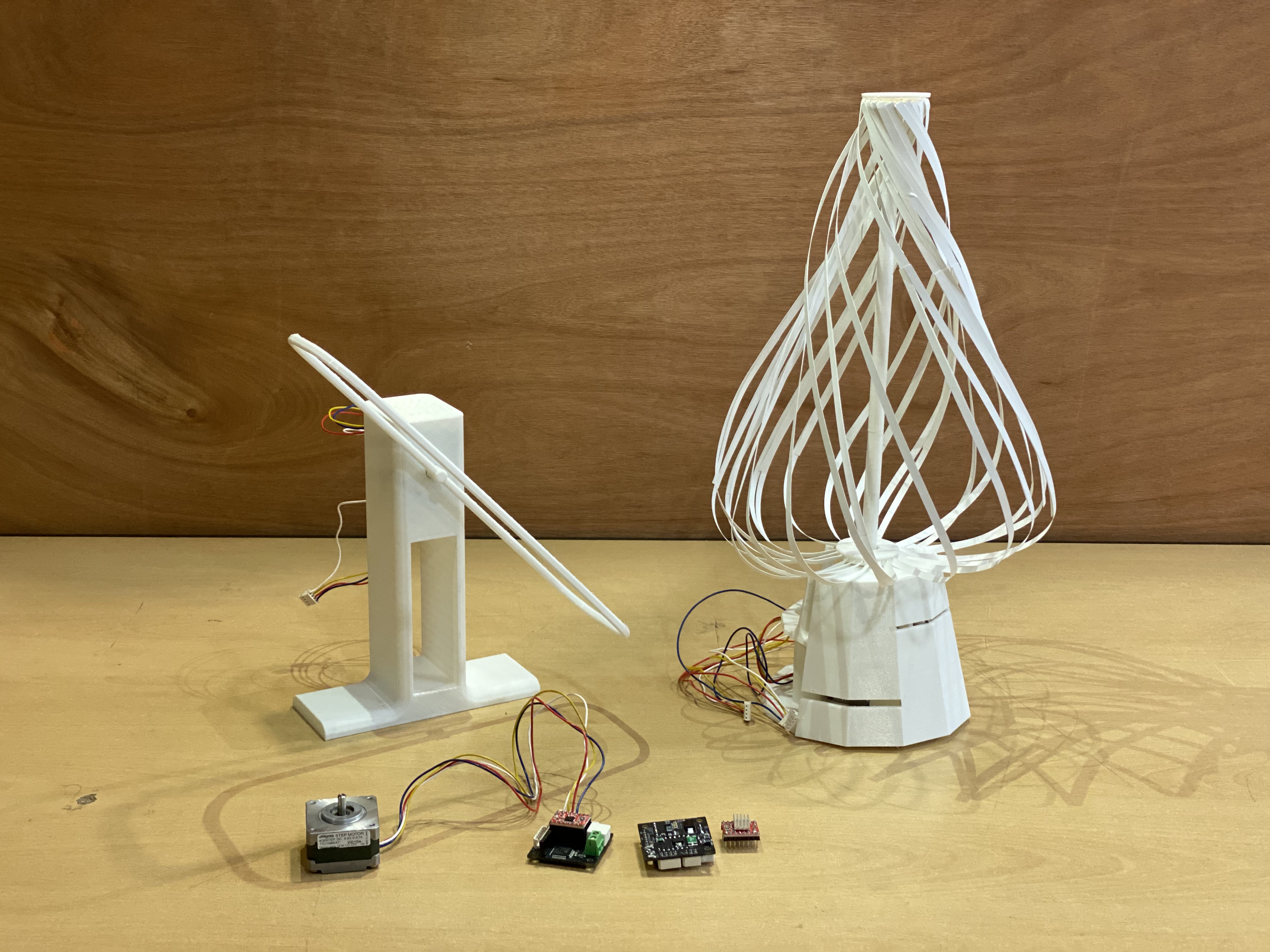
SF영화에 나오는 휴머노이드가 아닌, 현실 속 팔만 달리거나 얼굴이 없는 로봇들을 위한 '인터랙션 프레임워크'를 제작하고자 다양한 형태의 로봇이 어떻게 움직임을 통해 인간과 상호작용하는지를 탐구하였다. 이를 통해 '살아 움직이는', '감정과 정보를 전달할 수 있는'사물들, 로봇 시스템을 탄생시켰으며, 이를 구현하는 과정에서 추가적인 센서 없이 모터만으로 입력과 출력을 통합할 수 있는 인터페이스를 구현하여 하나의 통합된 PCB로 제작하였다. 두가지의 구조는 중심축을 기준으로 수직 형태의 flexible한 구조가 커튼처럼 이어져 있는 형태로, 위의 축과 아래 축이 회전 속도를 달리하면 구조가 뒤틀리고 꼬이면서 다양한 무늬와 형상을 나타내게 된다. 이러한 형상을 활용해 정보를 전달할 수 있을 것으로 예상되며, 무엇보다 사람이 직접 만져서 인터랙션을 불러일으키기 용이한 어포던스가 새롭다는 면에서 의의가 있다. 두 번째 구조는 시소의 구조로, 넓은 판형의 형태가 수평으로 평형을 맞추다가 흔들리는 등의 움직임을 통해 다양한 정보를 전달 할 수 있다. 추가적인 센서 없이 구동부 모터만을 매개로 사용자 입력을 감지하기 위한 제어 시스템 연구를 위하여 모터별 전류, 전압 특성 파악에 대한 연구를 진행하였다. open loop 제어로 회전 각 지정이 가능하고 정숙한 Stepper Motor를 선정하여 부하별 전류 특성에 대한 연구를 추가로 진행하였다. 로터에 가해지는 부하의 회전 방향에 따라 모터에 흐르는 전류의 양이 변화한다는 것을 확인했다. 본 연구팀은 0Step/sec – 1000Step/sec 구간에서 전류가 선형적으로 증가한다는 것과 부분적으로 모터에 공진이 일어나는 속도 구간이 존재한다는 것을 확인했다. 공진이 일어나는 구간에 대해서는 microstepping을 통해 진동과 소음을 제어할 수 있게 되었고, 이산적인 속도-전류 데이터 값으로부터 임의의 N개의 선형회귀식으로 피팅할 수 있는 알고리즘을 만들어 데이터를 압축했다.
담당부서학생행정실
전화번호880-2277