loaction
창의설계축전 공모작
재난구조 로봇 원격제어용 Soft Glove
-
참가 부문
-
학과
기계항공공학부
-
팀명
Soft Thinker
-
신청자 이름
김찬교
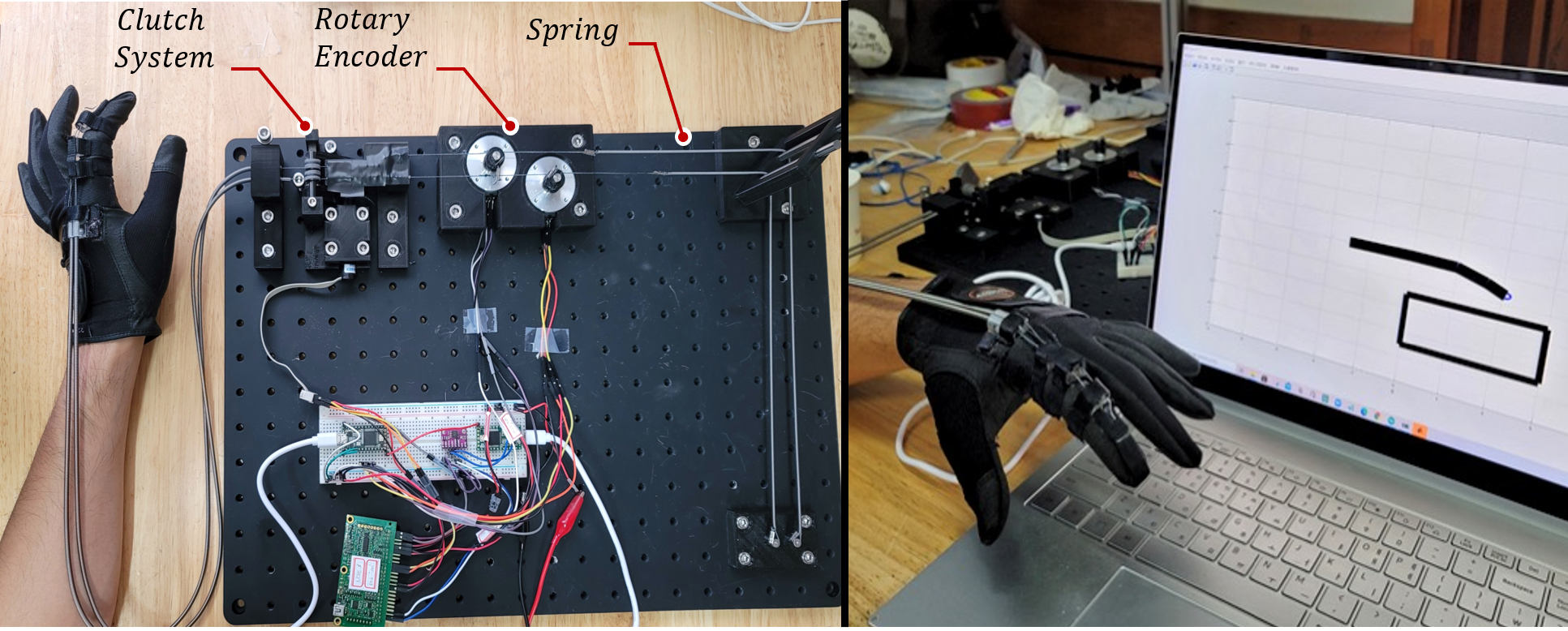
로봇 손 (Robot hand)은 사람의 손과 유사한 형태의 기계 장치로, 이를 이용하여 정밀한 업무(work)를 수행하는 연구가 활발히 이루어져 왔다. Robot hand 조작을 위해 사용자 손의 관절 정보를 측정하고 이를 기반으로 원격 제어 하는 기술 (Master hand, Teleoperation)에 대한 연구 역시 활발히 이뤄져 왔다. 하지만 재난 현장에서 기존 산업의 master hand를 사용하기엔 여러 단점이 존재한다. 기존의 master hand는 강체로 구성되어 있어 무게가 무겁고 크기가 크다. 이로 인하여 공간의 제약이 있고 사용자의 자유로운 움직임을 강제하는 상당한 불편함을 초래한다.
한편, 시야 확보가 어려운 환경일수록 로봇 손의 감각을 사용자가 느끼면서 조작하는 직관적인 조작 방식은 그 가치가 높다.
따라서 본 연구에서는 이러한 기존의 master hand를 개선하기 위하여 소프트 로보틱스를 활용하여 새로운 형태의 Soft Robotic Glove (master hand) 를 개발하였다. 본 연구의 master hand는 사용자 손의 관절 정보를 측정하여 이를 로봇 손에 전달하는 기술 (motion tracking)과 로봇 손의 감각을 사용자에게 전달하는 역감 기술 (force feedback)이 통합된 웨어러블 장갑이다.
본 장갑의 핵심 기술은 tendon(wire)을 이용해 관절 정보를 측정함과 동시에, 로봇 손이 물체와 접촉했을 때 사용자 손에 그 감각을 알려주는 2가지 기술을 one-way bearing을 이용하여 구현한 것이다. 가벼운 설계 방식을 채택하여 사용의 편리성을 확보했고, 경제적으로도 큰 이점을 가지고 있다. 따라서 상용화 가능성이 높고 재난 현장에 국한되지 않고 VR, 게임 산업 등 여러 산업에서도 다용도로 활용될 것으로 기대된다.
담당부서학생행정실
전화번호880-2277