loaction
창의설계축전 공모작
2-Wheel Mecanum Bot
-
참가 부문
-
학과
전기·정보공학부
-
팀명
순살치킨
-
신청자 이름
김민규
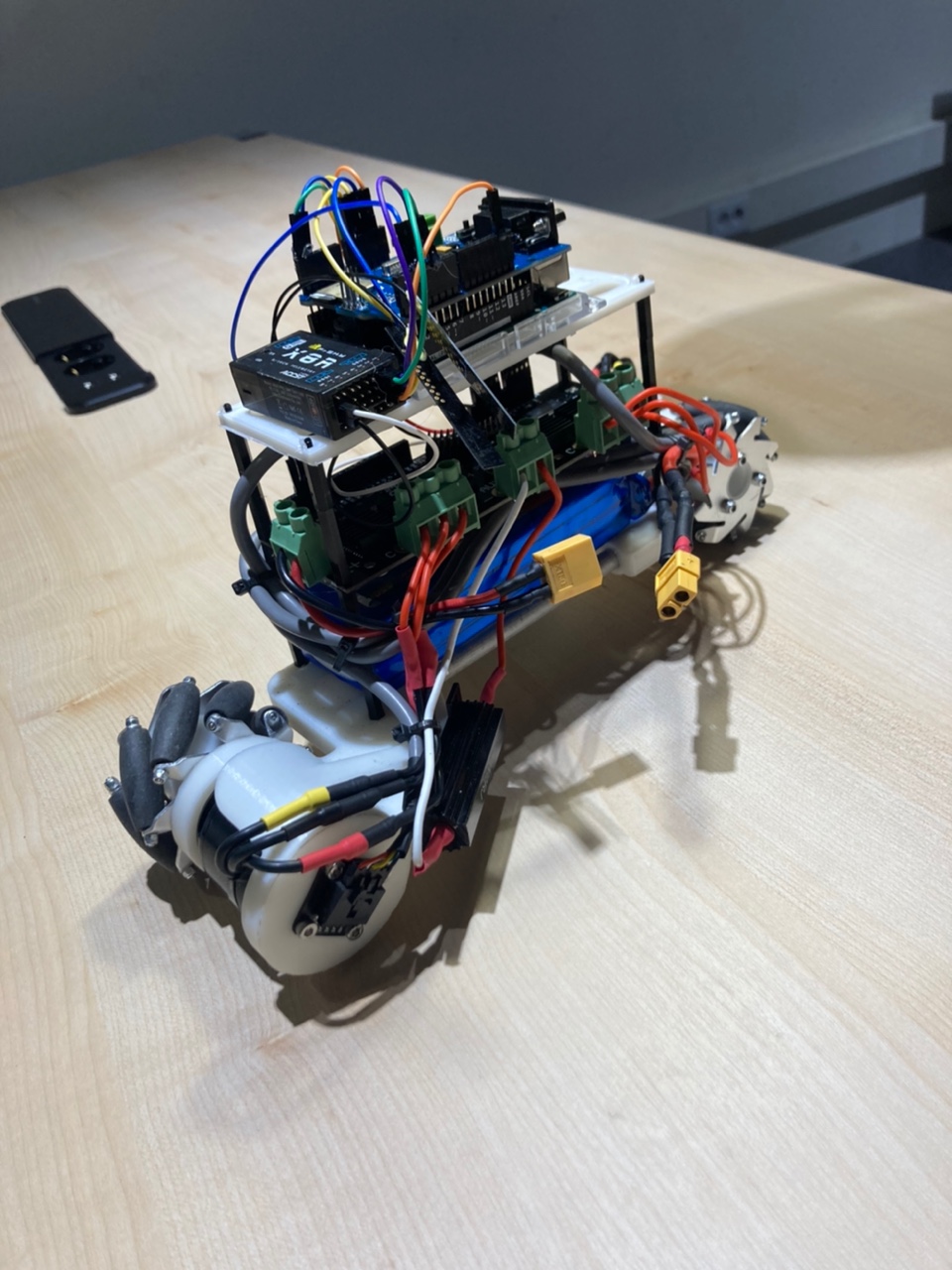
일반 바퀴와는 다른 특수한 구조를 가진 메카넘 휠 (Mecanum wheel)은 로봇의 전방향 주행, 즉 홀로노믹(Holonomic)한 주행을 가능케 한다. 하지만 이를 구현하기 위해서는 이론상 최소 3개의 메카넘 휠이 필요하며 일반적으로는 제어의 용이성 때문에 4개의 바퀴가 사용되고 있다. 이 작품은 2개의 메카넘 휠을 사용한 로봇으로서, 이 경우 이론적으로 완전한 전방향 주행은 불가능하나 이 작품에서는 IMU를 이용하여 자체 각속도 및 각도 측정값을 통해 제어 신호를 조절함으로서 단순 좌표 이동 (차체의 회전은 무시)를 가능케하였다. 또한 로봇의 제작에 있어서는 오픈소스 로보틱스 모터 제어 보드인 Odrive를 사용하여, 상용 드론 모터(BLDC)에 인크리멘탈 마그네틱 엔코더를 부착하여 구동 모터로 사용하였고 그 기능을 확인하였다. 이 보드를 기반으로 완전한 모터의 속도 제어 및 회생제동(전자브레이크) 기능을 적용시켰으며, 안전을 위한 전류 제한 및 캘리브레이션 기능을 추가하였다. 또한 아두이노 우노와 CAN-BUS 모듈을 사용하여 속도제어를 위한 보드와 아두이노간 CAN-통신을 구현하였으며, 이를 통해 구조적 신뢰성과 제어의 정밀도를 증대하였다. 프레임 또한 3D 프린터를 통해 제작함으로서 보다 사람들이 쉽게 따라 만들 수 있도록 제작하였다. 이러한 2-Wheel Mecanum Bot의 구동은 매우 흥미로울 뿐만 아니라 제작이 어려워 단가가 비싼 메카넘 휠을 2개만 사용하여도 된다는 점에서 경제성의 측면에서 장점이 있으며, 특히나 완전한 전방향 주행이 아닌 좌표 이동 정도만 필요한 상황에서 그 힘을 발휘할 수 있을 것이다.
담당부서학생행정실
전화번호880-2277