loaction
창의설계축전 공모작
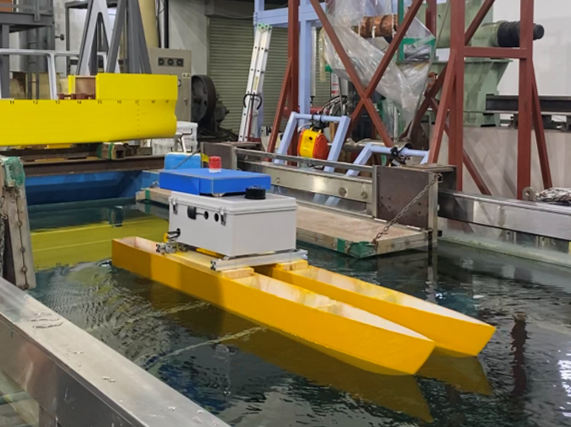
자율 주행 쌍동선
-
참가 부문
-
학과
조선해양공학과
-
팀명
뱃샤공
-
신청자 이름
차인호
1. 과제의 목적 및 필요성
◆ 최근 레저 선박에 대한 관심과 수요의 증가로 쌍동선에 대한 연구가 지속적으로 진행되고 있음.
◆ 요트를 이용하는데 있어 높은 비용과 이용 고객의 특성을 고려하였을 때, 자율주행 기술 접목시 국내 요트산업의 대중화에 기여할 수 있음.
2. 해결방안
◆ 본 작품에서는 쌍동선을 직접 제작한후, 자율주행에 대한 검증의 일환으로 충돌 회피 알고리즘인 속도 장애물 기법을 구현함. 이를 프루드 상사 스케일을 확대시켜 활용한다면 자율주행 요트를 만들 수 있음.
3. 작품 구성
◆ 본 작품은 크게 자율주행에 필요한 IMU, GPS, LiDAR, Camera를 포함한 상부 구조물과 프로펠러를 장착한 선형으로 구성.
◆ 상부 구조물에 탑재된 알고리즘은 충돌 회피 알고리즘으로 속도 장애물 기법을 사용.
◆ 자율주행 쌍동선이라는 관점에서 새로운 선형을 설계하는 것보다 기존에 설계된, 조종 시뮬레이션을 위한 유체력 미계수가 존재하는 쌍동선 선형(NPL-4a)을 채택하였고, 이를 3D-프린트를 이용하여 뽑아냄
◆ 프로펠러의 경우 Bluerobotics 사의 방수가 되며 회전수에 대한 추진력이 계산되어 있는 프로펠러 T-200을 사용.
4. 결과물의 장점 및 기대효과
◆ 본 작품은 동일한 크기의 두 개의 평행 선체를 특징으로 하는 선박으로 기존의 단일 선체에 비교하여 작은 배수량으로 인해 유체역학적 힘을 덜 받으므로 더 작은 추진력으로 고속 주행 가능 및 두 선체 간 넓은 폭으로 인해 큰 안정성을 가짐.
◆ 쌍동선은 급격하게 발전하고 있는 자율주행 기술과 성장 가능성이 높다고 평가되는 국내 요트산업에 있어 무인화와 안전성, 경제성 향상의 시너지 효과를 불러올 수 있음.
담당부서학생행정실
전화번호880-2277