loaction
창의설계축전 공모작
익사 방지 RC Boat 구조대
-
참가 부문
-
학과
기계항공공학부
-
팀명
알보칠
-
신청자 이름
서주호
본 과제는 인적이 드문 시간과 장소에서 발생하는 익사 사고의 예방을 위한 객체탐지 자율주행 보트를 개발하는 데에 그 목적이 있다. 실제로 익수자의 구조는 초기 발견자의 신고에 크게 의존하고 있으며, 수영장과 바닷가에서도 여전히 많은 곳에서 안전 요원을 배치하고 있다. 하지만 안전요원이 없는, 새벽 시간대의 강이나 산 속의 계곡과 같은 곳에서는 익사 사고 위험에 그대로 노출되어 있다. 따라서 사람이 있으면 위험한 시간과 장소에서 사람을 인식하고 사고 신고와 구조 활동까지 자율적으로 할 수 있는 보트 같은 무인 장치가 필요하다.
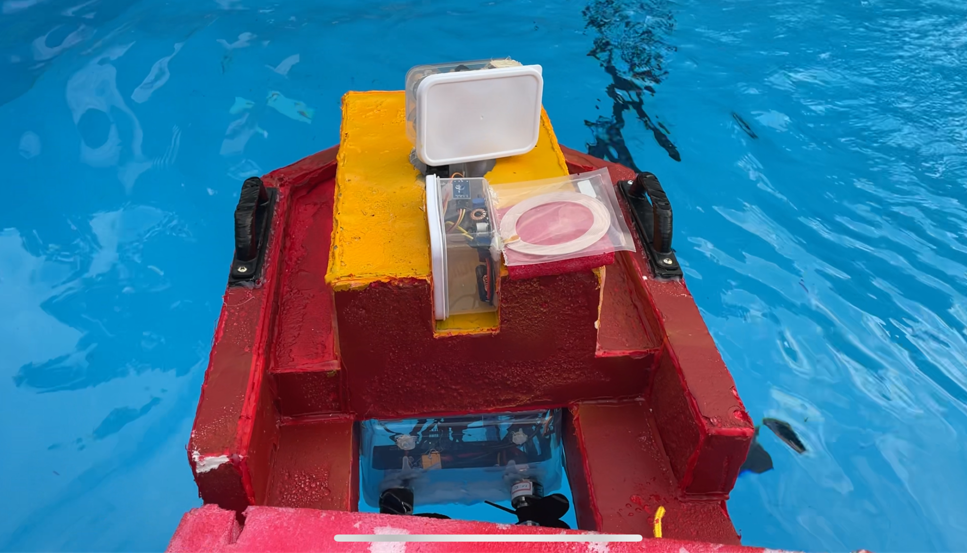
프로젝트 결과물은 보트와 스테이션으로 구성된다. 보트는 카메라와 인공지능 사물인식 모델을 통한 사람 인식, 사고 장소의 GPS 좌표 정보 전달, 익수자에게 접근하는 구조활동의 역할을 수행한다. 스테이션은 보트 배터리의 충전, 보트로부터 사고 정보 수합, 보트의 홈커밍 유도 역할을 수행한다. 특히 보트에서는 광도센서를 이용하여 밝기에 따라 LED를 켜고 끔으로서 시간에 관계없이 안정적으로 사물인식을 진행할 수 있으며, 가속도 센서를 이용하여 익수자가 보트를 붙잡았는지의 여부를 확인하여 스테이션에게 줄을 당겨 홈커밍을 유도하도록 신호를 보낼 수 있다.
기존에 개발된 무인 인명구조 보트와 달리 본 결과물은 사람의 조종을 필요로 하지 않으며, 사고의 인식부터 신고 및 구조 활동까지 온전히 자율적으로 이루어진다는 점에서 특 장점을 갖는다. 또 튜브를 익수자 방향으로 낙하시키는 드론과는 달리 직접 사고자에게 달려가는 보트를 사용하여 구조의 정확성을 높였다. 주변의 목격자 존재 유무에 관계없이 언제 어디에서든지 수상 안전을 지킬 수 있기를 기대한다.
담당부서학생행정실
전화번호880-2277