loaction
창의설계축전 공모작
일반
-
참가 부문
-
학과
기계공학부
-
팀명
I control
-
신청자 이름
김재현
신체적인 움직임이 자유롭지 않은, 중도 장애인이 눈동자의 움직임을 이용하여 휠체어를 제어하는 방법을 만들어주어 이들에게 주체적인 행동의 경험을 제공하고자 함을 목적으로 개발을 시작하였다.
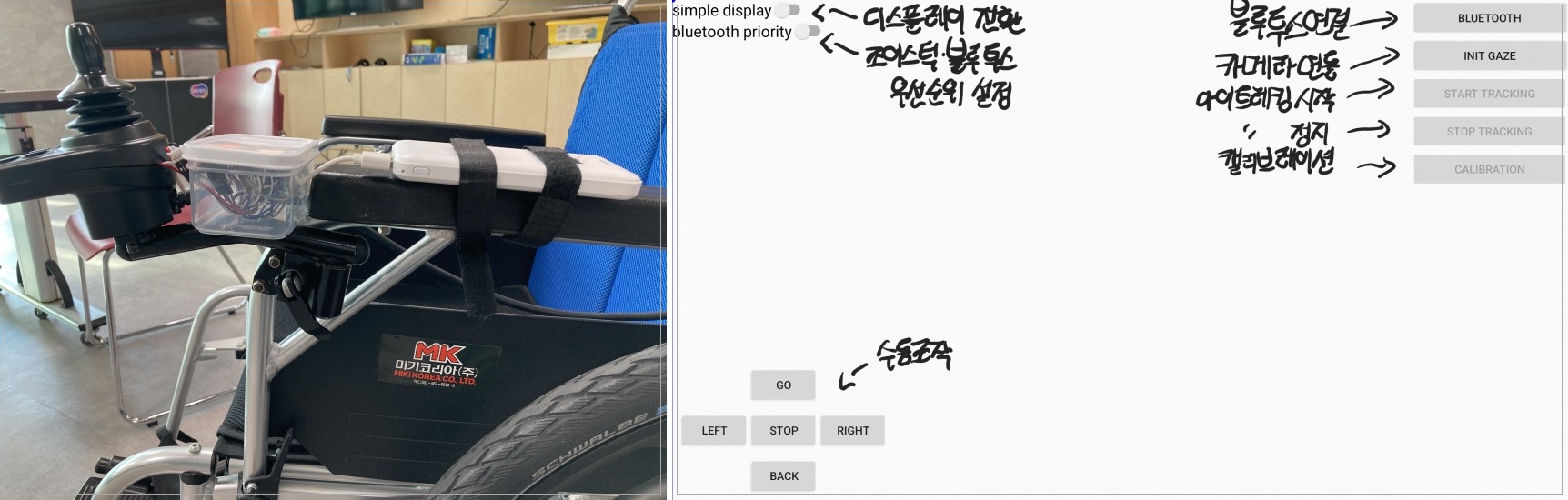
Seeso 사의 SDK를 활용하여 카메라 위치를 기준으로 안구의 상대적인 위치에 대한 정보를 받는다. 직관적인 조종을 위해 화면을 기준으로 위쪽은 전진, 아래쪽은 후진, 왼쪽은 좌회전, 오른쪽은 우회전으로 매칭하였다. 화면을 기울이거나 가까이하는 등의 움직임도 가능하기 때문에 얼굴이 인식되는 범위 안에서 자유롭게 인식 위치를 바꿀 수 있다. 이러한 위치 데이터를 BLE를 이용하여 아두이노로 보내 휠체어를 조작한다.
바라보는 위치 정보가 불확실할 경우 이를 보정할 수 있는 calibration을 넣어두었다. 카메라 화면(본인 얼굴)을 보면서 동작하는 방식, 아이콘을 보면서 동작하는 방식의 두 가지 인터페이스가 있다. 블루투스와 조이스틱의 두 가지 조종 방법을 변경할 수 있도록 하였으며 기본 옵션을 조이스틱으로 두고 특정 코드를 전송하지 않으면 둘 사이의 전환이 일어나지 않도록 하였다. 이러한 방법으로 접근 권한이 없는 다른 사람이 조작하는 일을 막을 수 있다.
기존 전동 휠체어에는 BLE 모듈이 없어 하드웨어 상에서 BLE 통신이 가능하도록 설정해야 했다. 이를 위하여 Bluno nano라는 arduino BLE를 기존 휠체어의 PCB 보드에 연결하였다. 불필요한 장비들로 인한 부상을 막기 위하여 사이즈를 줄여 만들었다.
이 제품은 널리 보급된 스마트폰을 활용하는 것이기 때문에 기존 아이트래커 노트북에 비해 비용이 매우 저렴하고 접근하기 편하다. 또한 하드웨어적으로 기존에 없던 블루투스 통신 방식을 추가하여 장애인들의 장애 유형에 따라 그들에게 맞는 조종 방법을 개발할 수 있는 길을 열었다는 점에 의의가 있다.
담당부서학생행정실
전화번호880-2277