loaction
창의설계축전 공모작
수평 유지형 운반 로봇
-
참가 부문
-
학과
전기·정보공학부
-
팀명
균형잡이
-
신청자 이름
김태선
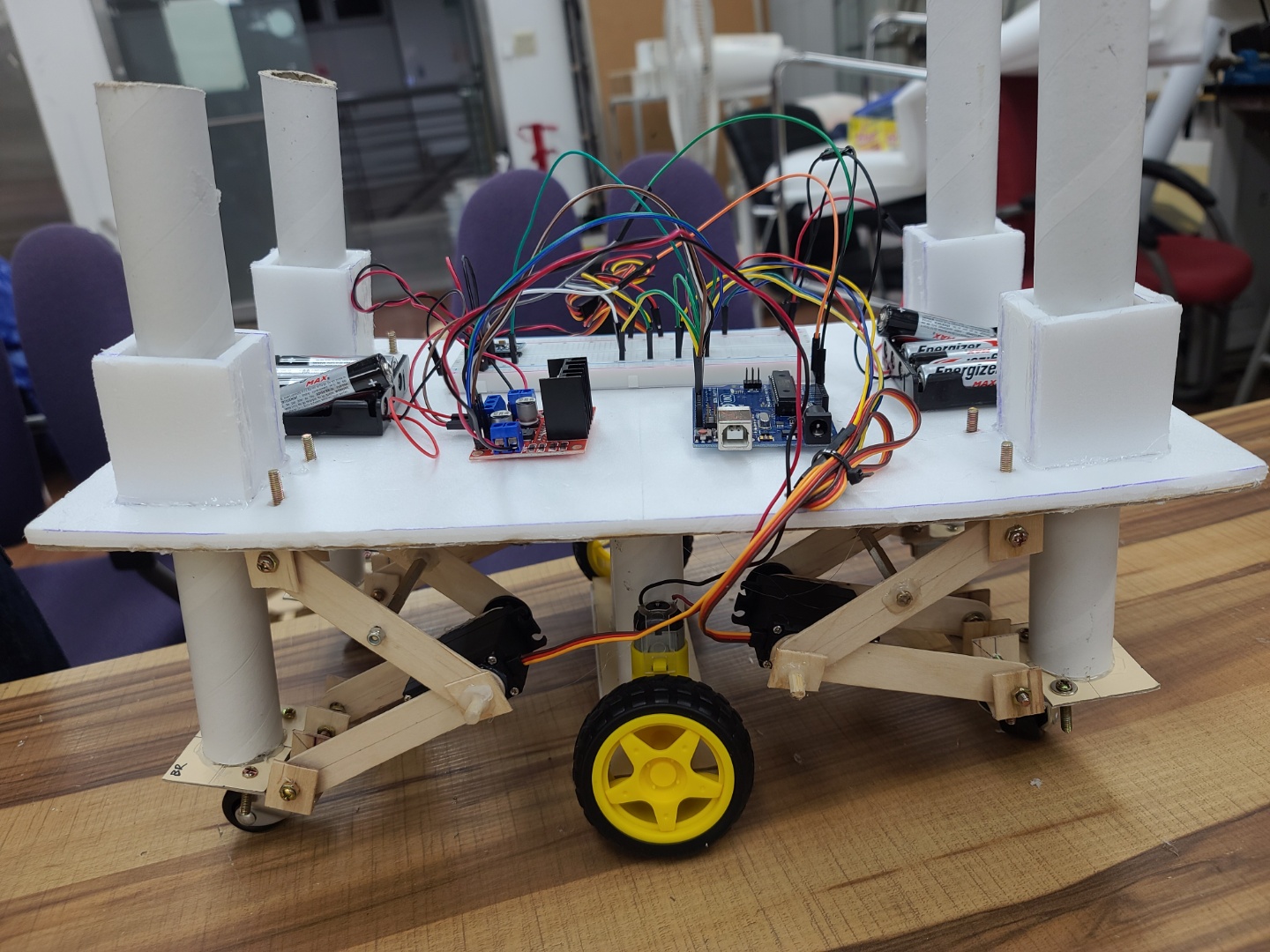
일반적으로 우리 사회에서 사용되는 화물 운송 자동차는 경사면의 기울기에 따라 운반되는 화물의 품질이 저하되거나 손상되는 일이 비일비재하다. 이러한 문제점을 보완하고자, 본 팀은 자율적으로 수평을 유지하는 운반 로봇을 개발하고자 하였고, 기존에 없던 디자인과 기능성을 바탕으로 차별점을 두었다. 디자인적 측면에서는 모노 휠 자전거의 원통형 외관을 차용하여 발전시키고자 했다. 본체에 동력을 가하는 주 바퀴 2개와 본체의 기울기를 조정하는 보조 바퀴 4개로 구성된 총 6개의 바퀴를 사용하였다. 차량 제어를 위한 회로는 아두이노를 활용하여 설계하였으며, 보조 바퀴와 연결된 다리의 경우 서보모터를 통해 조작하였다. 본체에는 가속도 센서와 자이로 센서를 포함한 센서 모듈을 부착하여 실시간으로 차량의 운동 상태, 즉 기울어진 상태를 측정할 수 있게 하였다. 오일러 각도를 측정하고 상보 필터의 원리를 바탕으로 보정 각도를 계산해, 다리 길이 조절에 이용할 수 있도록 코드를 작성하였다. 본체 제작의 경우, CAD 프로그램으로 3D 모델링을 정량적으로 설계한 이후, 모델링을 기반으로 하여 직접 목재와 우드락 등을 사용해 수재로 가공하는 방식으로 진행하였다. 프로토타입 제작 이후에는 초기 설정값과 가중치 등을 변경해가면서 차량 작동의 안정성을 확보하기 위해 노력하였다. 본 설계의 특장점으로는 독특한 디자인과 구조적인 안정성을 들 수 있다. 해당 차량이 실제 생활 속에 상용화되면 화물의 훼손 등을 방지해 운송 시스템의 효율성을 증가시킬 수 있을 것이며, 더 나아가 화물뿐이 아닌 운전자의 수평 유지에 응용해 탑승 만족감을 향상할 수도 있을 것으로 기대된다.
담당부서학생행정실
전화번호880-2277