loaction
창의설계축전 공모작
엘리베이터 조작이 가능한 로봇 팔 모듈
-
참가 부문
-
학과
기계항공공학부
-
팀명
애호박
-
신청자 이름
학생행정실
로봇 산업이 기존 제조 분야에서 물류, 자율주행 분야로 확장됨에 따라 로봇의 이동성이 중요한 요소로 자리매김 되고 있다. 로봇의 이동성은 평면 이동 뿐 아니라 층간 이동 또한 중요한데, 최근의 로봇 층간 이동은 인프라가 구축된 건물과 로봇이 통신하여 승강기를 제어하는 방법으로 구현되고 있다. 하지만 이는 건물이 관련 인프라를 가지고 있어야 한다는 제약 조건이 있기 때문에, 이를 통하지 않고도 층간이동을 가능케 하는“엘레베이터 조작이 가능한 로봇 팔 모듈”을 고안 및 제작하였다. 건물과 통신을 하지 않고, 사람이 직접 승강기를 타듯 승강기 버튼을 인식하여 물리적으로 버튼을 누르게 해 로봇의 층간 이동을 가능케 한다.
과제의 최종 목표는 “엘리베이터 버튼을 인식하여, 원하는 층의 버튼을 로봇 팔로 누르기”이다. 이를 수행하기 위하여 로봇은 크게 영상 처리부와 팔 제어부로 나뉜다.
영상 처리부에서는 카메라로 전방 이미지를 입력받아 OCR(광학 문자 기술)을 통해 원하는 버튼이 사진상에서 어디에 있는지 찾아내고, 이를 3D 좌표로 변환하여 로봇 팔이 그곳으로 이동할 수 있게 끔 정보를 전달한다. OCR을 수행하기 위해 R-CNN 기반의 딥러닝 알고리즘을 도입하였으며, 이를 구동하기 위한 장치로 NVIDIA 社의 Jetson Nano를 선택했다.
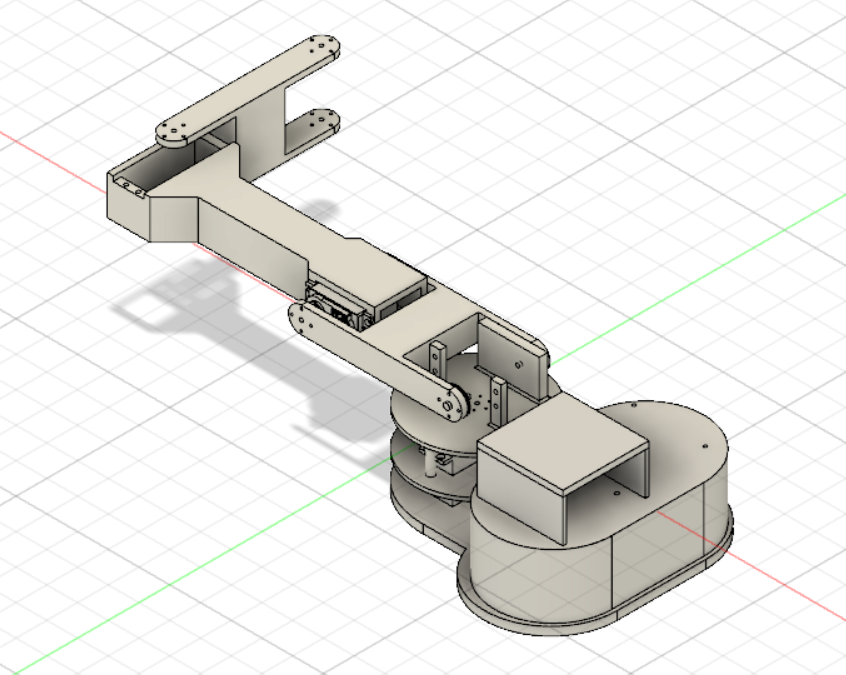
엘리베이터 버튼을 누르기 위해 5DOF의 로봇 팔을 제작하였으며, 이를 제어하기 위해 제어부로 Arduino Uno 보드를 사용하였다. 로봇 팔의 모든 부품은 3D 프린터로 출력하였으며, 구동을 위해 서보모터 5개를 장착했다. 단, Arduino 보드의 계산 성능이 비교적 낮기에 Jetson Nano 보드에서 제어를 위한 Inverse Kinematics를 수행한 뒤 각 서보모터의 목표 각도 값을 Arduino 보드로 전달하였다.
담당부서학생행정실
전화번호880-2277