loaction
창의설계축전 공모작
평면 이동이 가능한 6-dimension 로봇팔
-
참가 부문
-
학과
기계공학부
-
팀명
44동 주민들
-
신청자 이름
박진수
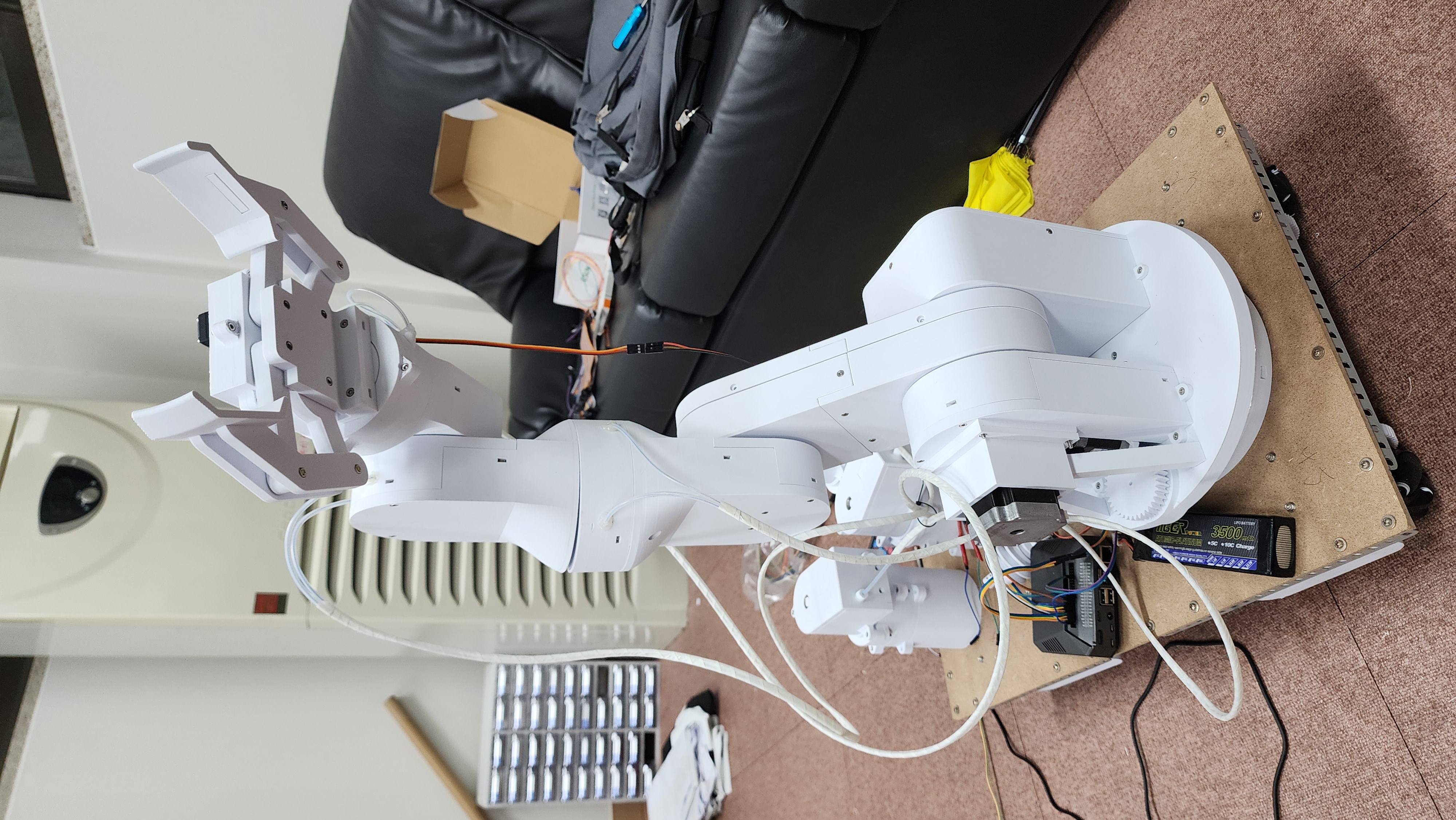
고령화가 진행됨에 따라 집에서 움직이기 불편한 사람이 늘어나고 있다. 이 사람들을 위해 가정에서 직접 움직일 필요 없이 무선 조종기를 통해 원하는 물건을 집어서 가져올 수 있는 로봇을 제작하고자 하였다. 로봇은 보통 가격이 비싸 구매가 부담될 수 있다. 그래서 로봇 제작에 필요한 주요 부품을 3D 프린터를 이용해 직접 프린트하고, 모터와 바퀴 등을 스스로 조립해 저렴한 가격으로 로봇을 장만할 수 있도록 하는 것을 과제의 주요 목적으로 삼았다.
로봇팔은 정밀한 움직임을 표현할 수 있도록 스텝모터를 사용했고, 로봇팔의 끝 쪽에 있는 구동 부위는 철사와 튜브를 이용해 간접적으로 모터의 동력을 전달할 수 있도록 설계했다. 로봇팔 자체의 구동을 위해서 4개의 메카넘 휠과 dc 모터를 사용해 로봇의 전후좌우, 대각선 방향 및 회전을 제어할 수 있도록 했다.
vpython 모듈과 vector class를 이용해 집게의 좌표가 주어졌을 때 각 조인트의 좌표를 구하는 프로그램을 만들고, 로봇팔의 길이 데이터를 넣어 실제 동작과 비교해보았다. 또한, xbox controller를 라즈베리 파이와 블루투스를 통해 연결하여 무선으로 로봇을 조종할 수 있도록 각 버튼을 매핑했다. 최종적으로 컨트롤러로 입력을 주었을 때 각 모터가 어느 속도로 얼마나 움직여야 하는지 계산해주는 코드를 만들고 이를 로봇에게 그대로 적용해 움직여보기도 하였다. 이 모든 것을 통해 많은 시행착오를 거쳐 자유롭게 움직이는 로봇팔을 만들 수 있었다.
머지않은 미래에 3D 프린터가 상용화되면 실생활에서 게임처럼 조종기로 조종하며 편리하게 사용할 수 있고, 직접 조립하며 로봇의 원리에 대해 자세히 익힐 수 있는 본 로봇은 매우 경쟁력 있는 상품이 될 수 있을 것이다.
담당부서학생행정실
전화번호880-2277