loaction
창의설계축전 공모작
Design and fabrication of 6-axis robot arms for automation of 3d printing post-processing
-
참가 부문
-
학과
재료공학부
-
팀명
Auto Robotics
-
신청자 이름
소연우
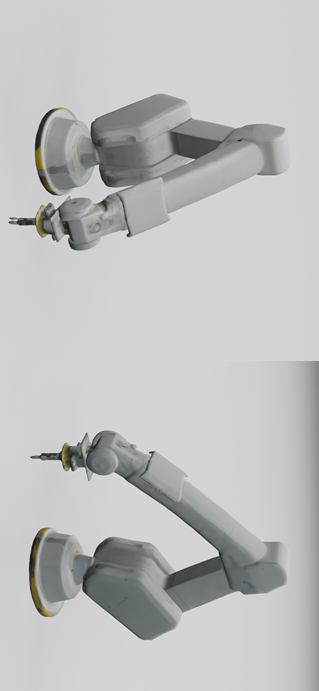
3D 프린팅 기술은 복잡한 형상의 부품을 신속하고 저비용으로 제작할 수 있으며, 의료, 항공우주, 자동차 분야에서 중요성이 커지고 있다. 그러나 3D 프린터로 출력된 제품은 서포터 제거, 연마, 도색과 같은 후처리 과정을 필요로 하고, 연마 과정은 주로 수작업으로 진행되며 시간과 노동력이 많이 소요되고 건강에 유해한 미세먼지를 발생시킨다. 본 과제는 6축 로봇팔을 활용하여 연마 과정을 자동화함으로써 건강에 유해한 작업 환경을 피하고, 효율적이며 질 높은 연마 과정을 제공하고자 한다. 6축 로봇팔의 높은 유연성과 사포 팁의 종류와 시간의 정밀 제어를 통해 복잡한 구조의 출력물에 대해 일관된 품질로 맞춤형 연마가 가능하다. 또한, 반복적인 작업을 로봇팔로 대체하여 작업 효율을 극대화하고 작업 시간을 단축할 수 있다.
6축 로봇팔은 CAD를 이용하여 3D 모델링, 프린팅 후 모터, 센서 등과 함께 조립하여 제조하였다. 코딩은 아두이노 IDE를 이용하여 진행하였으며, 출력물의 인식, 그라인더 팁의 교체, 시간 등을 제어할 수 있다.
이 기술은 3D 프린팅 후처리뿐만 아니라 조립, 용접, 포장 등 다양한 자동화 과정에 활용될 수 있으며, 경제적으로 제작된 6축 로봇팔은 높은 시장성과 사업 경쟁력을 가지게 될 것이다. 자동화된 후처리 공정은 인건비 절감과 함께 높은 투자 대비 수익을 창출할 수 있을 것이다.
담당부서학생행정실
전화번호880-2277