loaction
창의설계축전 공모작
가상환경 연동 햅틱 글러브
-
참가 부문
창작활동부문
-
학과
기계공학부
-
팀명
햅틱커즈 (Hapticers)
-
신청자 이름
임태건
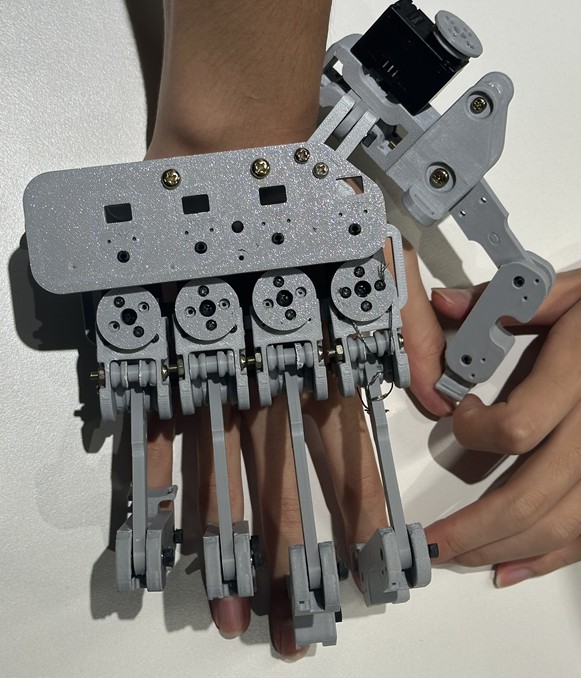
본 연구는 기존 VR teleoperation 방식이 가진 한계를 극복하고자 Haptic Glove를 개발한 과정을 다루고 있습니다. 현재 널리 사용되는 VR 기반 원격 조작 방식은 카메라 기반 손 추적이나 장갑 기반의 단순 위치 추적 기술에 의존하고 있습니다. 그러나 이러한 방식은 실제 환경에서 손과 물체가 상호작용할 때 필수적인 촉각적(cutaneous) 및 운동감각적(kinesthetic) 피드백을 사용자에게 제공하지 못한다는 근본적인 한계를 갖고 있습니다. 이는 정밀한 작업 수행을 어렵게 만들고, 나아가 원격 조작 과정에서 고품질의 학습 데이터를 확보하는 데에도 제약으로 작용합니다.
이러한 문제를 해결하기 위해 본 연구에서는 3D 프린팅을 활용하여 글러브의 골격을 제작하고, 저가형 Dynamixel 모터와 로터리 엔코더, 그리고 진동 모터 기반의 햅틱 모듈을 결합한 Haptic Glove를 설계·구현하였습니다. 모터와 와이어를 이용하여 손가락의 이완과 수축을 구현함으로써 사용자가 실제 힘을 느낄 수 있도록 하였고, 촉각 모터를 활용하여 접촉에 따른 피부 감각 피드백도 제공할 수 있도록 하였습니다. 이를 통해 본 연구의 Haptic Glove는 VR teleoperation에 필요한 kinesthetic feedback과 cutaneous feedback을 모두 제공할 수 있는 플랫폼으로 기능합니다.
아직까지는 VR 기기와의 완전한 연동 단계에 이르지 못하였으나, 최종적으로는 Meta Quest3와 같은 VR 기기와 본 Haptic Glove를 결합하여 정밀한 원격 조작을 수행하는 것을 목표로 하고 있습니다. 이를 통해 dexterous한 조작 작업에서 인간 시연 데이터를 수집하고, 해당 데이터를 기반으로 Imitation Learning(IL)을 수행함으로써 로봇의 정밀 조작 능력을 학습시키는 것이 본 연구의 궁극적인 목적입니다.
담당부서학생행정실
전화번호880-2277