loaction
창의설계축전 공모작
과일 수확 로봇 (Fruit Harvesting Robot)
-
참가 부문
창작활동부문
-
학과
기계공학부
-
팀명
딸기가 좋아 (Berry-Good Bot)
-
신청자 이름
박상원
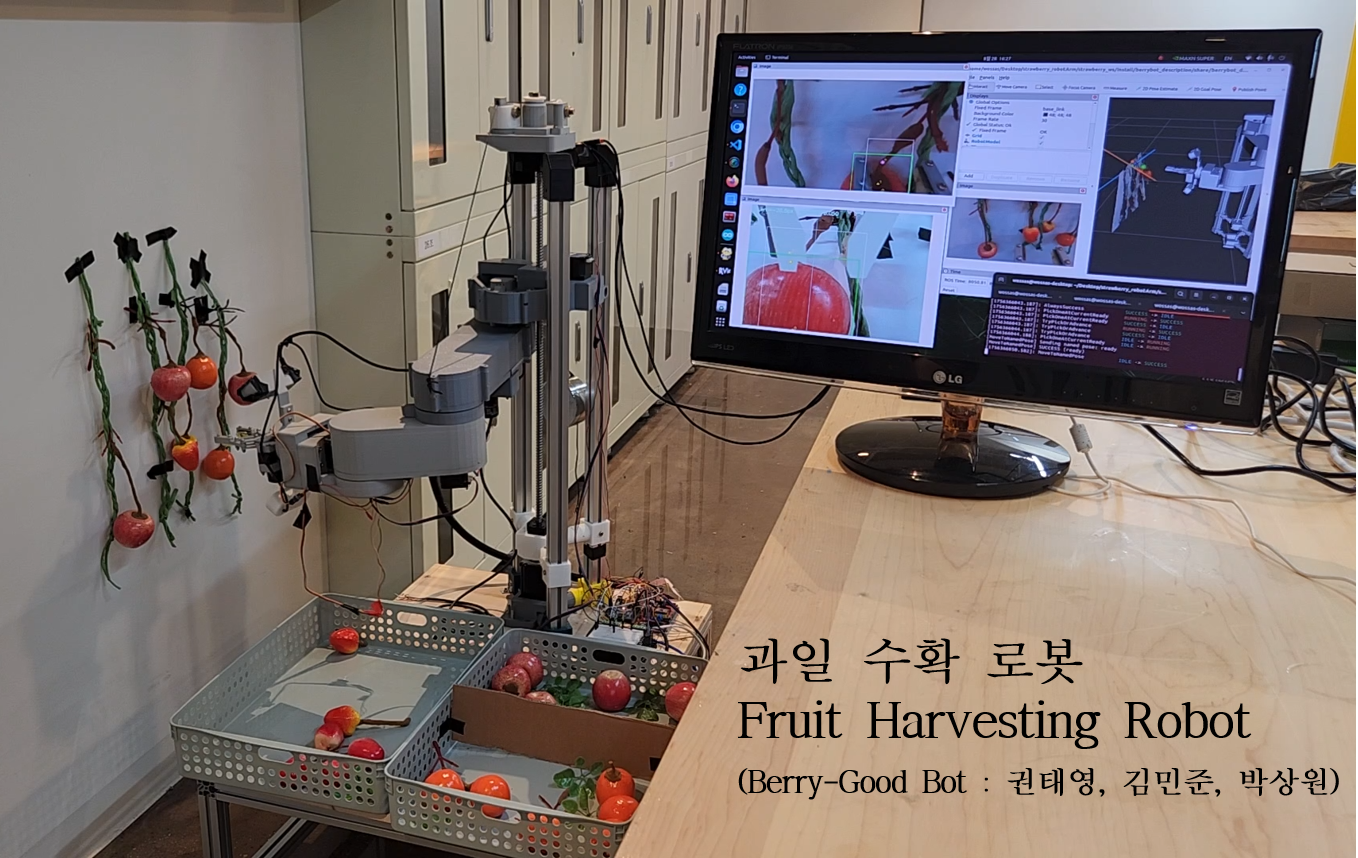
본 창작물 ‘과일 수확 로봇’은 농업 현장의 인력 부족 문제를 해소하고, 소규모 농가에서도 활용 가능한 현실적 자동화 솔루션을 제시하기 위해 개발하되었다. 기존 수확 로봇은 주로 미국·유럽의 대규모 농장을 대상으로 고가 장비 중심으로 개발되어 국내 비닐하우스 환경에 적용하기 어려웠으며, 상용화 사례도 제한적이고 가격 부담이 컸다. 이에 본 창작물은 약 100만 원 내외의 제작비와 ROS2 기반 모듈형 아키텍처를 도입하여 경제성과 환경 적응성을 동시에 확보하였다. 하드웨어는 5자유도 로봇 팔과 알루미늄 프로파일 기반 차체, 그리고 줄기 절단과 파지 기능을 결합한 엔드이펙터를 직접 설계·제작하여 이동성과 안정성을 구현하였다. 인식 부문에서는 약 2,500개의 과일 데이터를 활용해 딸기·사과·오렌지를 학습하도록 YOLO-pose 신경망을 훈련하여 과일의 위치와 특징점을 정밀하게 추출할 수 있도록 하였다. 제어 부문에서는 Jetson Orin Nano 기반 ROS2 환경에서 IBVS·PBVS를 결합한 Hybrid Visual Servo 알고리즘을 개발하여 근접 구간에서도 안정적인 위치 제어와 수확 작업을 수행할 수 있었다. 전체 작업 절차는 Behavior Tree 구조를 통해 Ready → Rough Approach → Fine Approach → Pick & Place 단계로 체계적이고 반복 가능한 수확 과정을 완성하였다. 본 창작물은 저비용·고효율 구조를 통해 소규모 농가에서도 도입 가능성을 확보하였으며, 농촌 인력난 해소와 생산성 향상에 기여하는 동시에 스마트 농업 및 농업 자동화 기술 확산의 중요한 기반이 될 것으로 기대된다.
담당부서학생행정실
전화번호880-2277