loaction
창의설계축전 공모작
에어웜
-
참가 부문
창작활동부문
-
학과
기계공학부
-
팀명
왕꿈틀이
-
신청자 이름
박연수
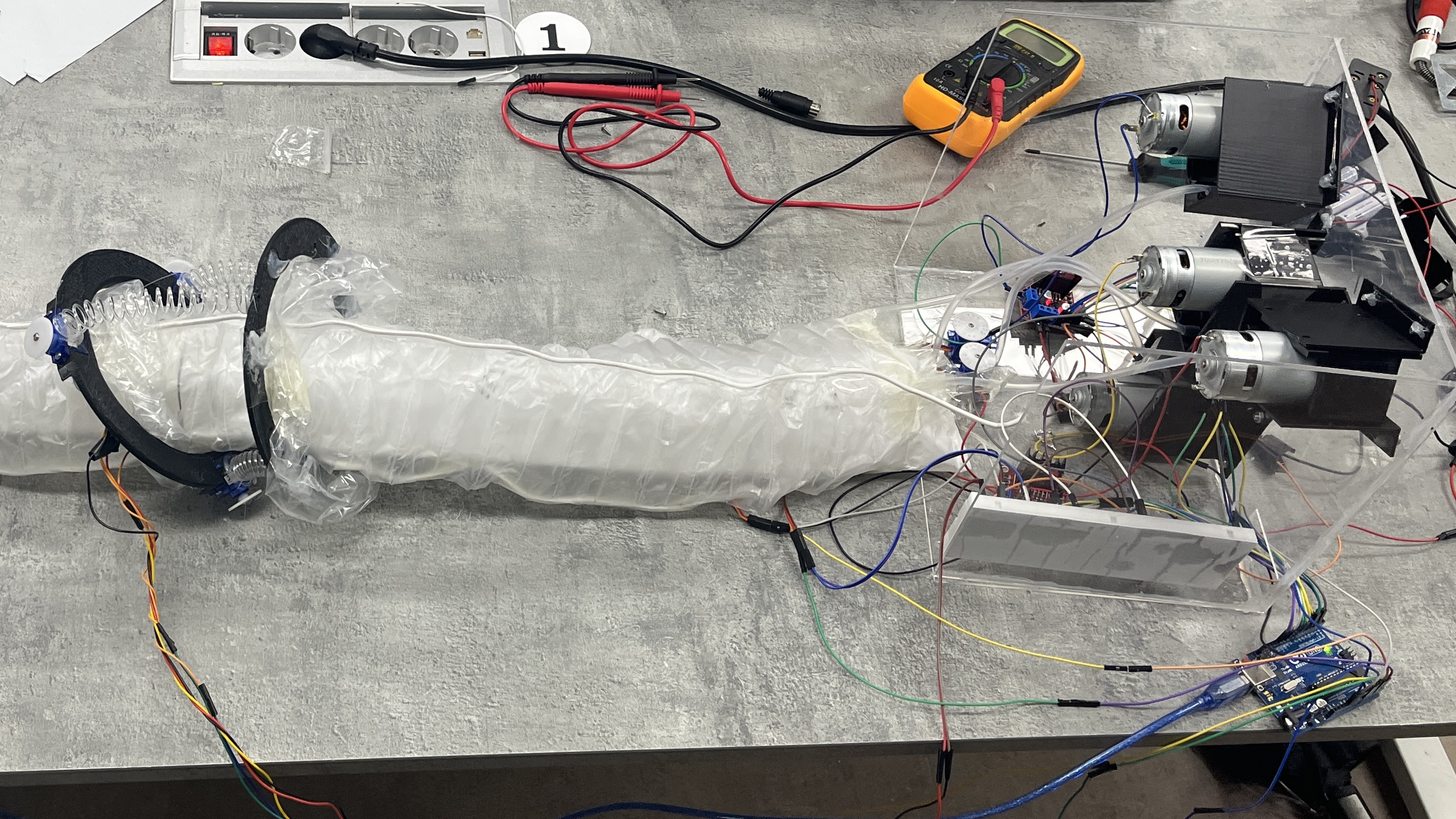
본 과제는 공압 기반 소프트 로봇의 소형화와 급격한 굽힘 구현을 목표로 진행되었다. 기존 연구에서 제시된 소프트 로봇은 안정성과 휘어짐 면에서는 장점이 있으나 직경이 커 활용도가 제한되고, 굽힘 각도도 작아 좁고 복잡한 환경에서는 제약이 많았다. 이에 따라 본 과제에서는 펌프·모터 기반의 새로운 구조를 설계하여, 풍선형 공압 구동부와 텐던 모듈을 결합함으로써 길이 조절과 국부 굽힘을 동시에 구현하고자 했다. 본체부는 아두이노, 전원 공급 장치, 펌프 4개, 서보모터 2개, 모터 드라이버 등으로 구성되며, 아크릴 프레임에 결합되어 안정적 구동이 가능하다. 풍선 구동부는 코어 풍선과 세 개의 보조 풍선으로 이루어져 있으며, HDPE 필름을 사용해 밀봉성과 내구성을 확보하였다. 보조 풍선은 부분 밀봉 구조를 통해 수축률 차이를 만들어내고, 이를 통해 최대 30%의 수축을 달성했으며 Endpoint 이동 거리는 약 24cm에 도달했다. 텐던 모듈은 링과 스프링, 낚싯줄, 서보모터를 활용해 생체 힘줄 구조를 모사하였으며, 한쪽 실이 당겨질 때 최대 40도의 굽힘을 구현할 수 있었다. 또한 서보모터 두 개를 이용해 텐던 위치를 본체와 Endpoint 사이에서 자유롭게 조절 가능하도록 설계했다. 이로써 로봇은 단순한 연장·수축을 넘어 관절과 같은 동작을 수행할 수 있으며, 원하는 위치로 EndPoint를 유도할 수 있다. 결과적으로 로봇은 300g 미만의 경량 구조를 가지며, 길이 확장이 용이해 다양한 환경에 적합하다. 본 연구는 소프트 로봇의 유연성과 생체 모사적 특성을 결합하여 장애물 회피, 배관 내부 탐사, 재난 구조 등 실제 응용 가능성을 입증했으며, 향후 더욱 소형화한다면 인체 내 혈관을 통한 카테터 시술 보조 등 의료 분야에서도 활용될 것으로 기대된다.
담당부서학생행정실
전화번호880-2277