loaction
창의설계축전 공모작
비전 기반 사물 배치 로봇
-
참가 부문
-
학과
기계항공공학부
-
팀명
Kerberos
-
신청자 이름
학생행정실
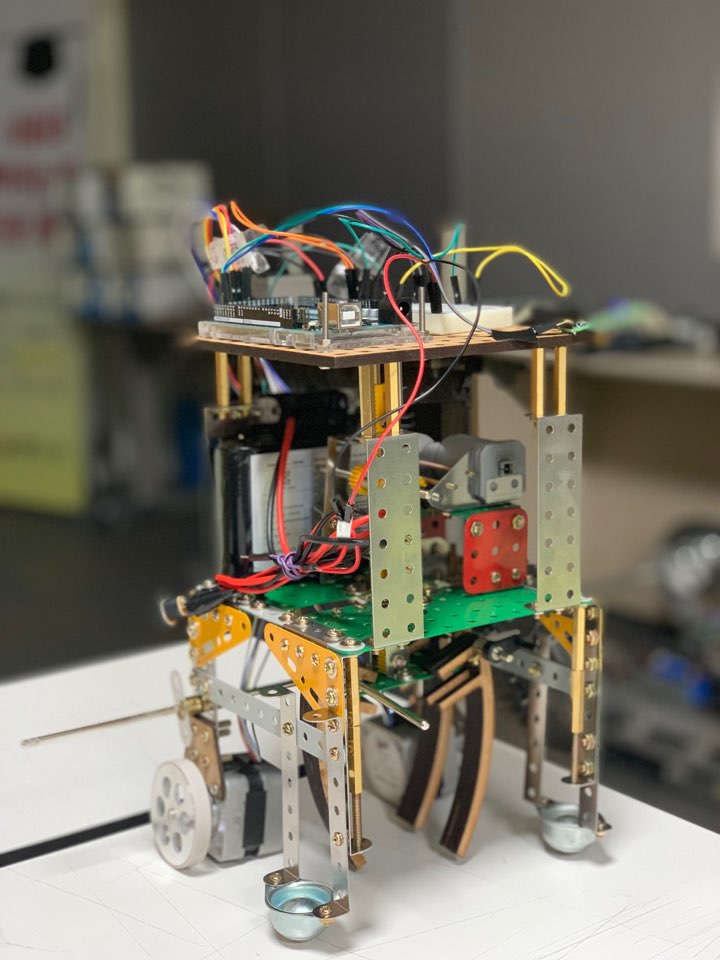
본 과제는 비전 정보를 통해 평면 위에 놓인 사물의 위치를 원하는 상태로 배치할 수 있는 로봇을 구현한다. 사용자가 목표로 하는 정리된 평면의 상태를 입력하면 로봇은 평면 위 물체들의 초기 위치를 카메라를 통해서 입력 받는다. 이후 정해진 알고리즘에 따라서 물건을 치워야 하는 순서와 그 경로를 결정하게 된다. 이에 따라 로봇이 물체의 위치까지 다다르게 되고 로봇에 부착된 그리퍼를 이용하여 목표로 한 물체를 잡는다. 마지막으로 물체를 잡은 상태에서 목표지점 까지 이동한 뒤 피드백을 통해 물체를 정확한 위치와 각도를 가지도록 놓게 된다.
이러한 메커니즘을 수행하기 위해서 크게 그리퍼를 포함한 로봇 하드웨어, 평면 위의 물체의 상태를 판단하는 비전, 받아들인 정보를 토대로 스스로 경로를 만들어 내는 알고리즘 부분으로 나누어 연구를 진행하였다. 카메라를 이용하여 평면 위에서 사진 을 찍게 되면, 책상 위의 물체를 구분 할 수 있고, 경기장의 가장자리 또한 인식하여 가동이 가능한 공간을 제한할 수 있었다. 이후 A*알고리즘에 기반한 방법에 따라 단시간에 경로를 탐색하여 장애물의 위치를 고려한 경로를 설계할 수 있었다. 이 경로를 따라 로봇이 이동을 할 수 있도록 작동 흐름을 설계했으며, 바퀴와 바닥의 마찰로 인한 제어 오류를 줄이기 위해 피드백을 가한다. 피드백 시스템을 통해 정확하고 물품 정리가 가능해질 것이다.
이 과제는 책상 위 사무용 물품들을 대상으로 연구가 진행되었지만, 무한한 발전 가능성을 가지고 있다. 사용자의 별다른 개입 없이 시각 정보만을 토대로 스스로 정리 순서와 경로를 찾아 물체를 정리할 수 있으므로 산업 현장이나 나아가 우주 탐사 현장에서도 응용이 가능하다.
담당부서학생행정실
전화번호880-2277