loaction
창의설계축전 공모작
이너시아
-
참가 부문
창작활동부문
-
학과
화학생물공학부
-
팀명
안선홍, 김민재
-
신청자 이름
권아현
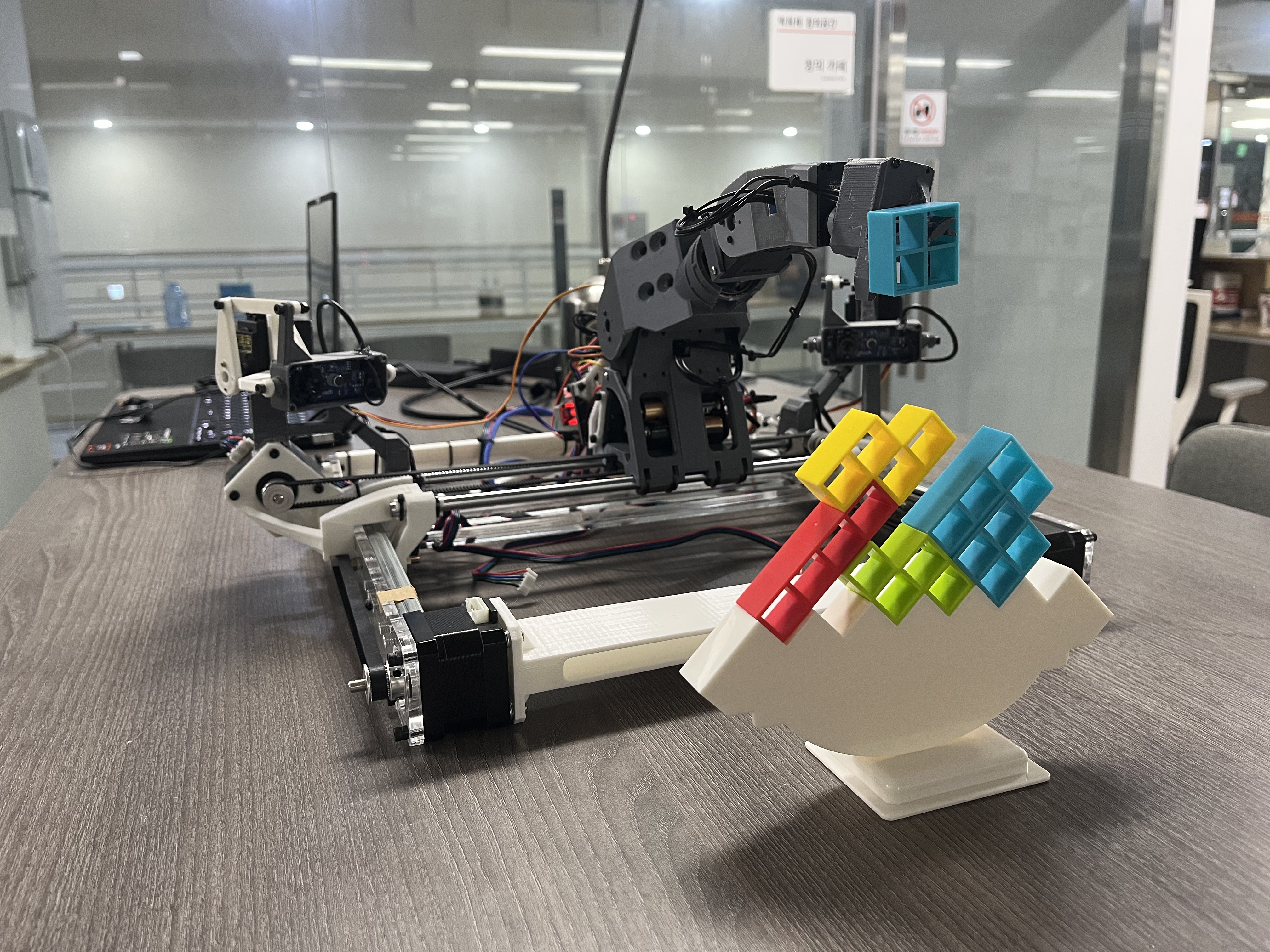
본 과제는 진동이 지속적으로 작용하는 플랫폼 위에 블록을 안정적으로 적층하는 로봇 시스템을 개발하는 것을 목적으로 한다. 기존 연구가 정적인 환경에서의 조작·조립에 집중해온 것과 달리, 본 연구는 불안정한 기반 위에 로봇이 자율적으로 균형을 유지하며 조립을 수행할 수 있는 가능성을 탐구하였다. 이를 위해 비전 인식, 경로 계획, 제어, 실시간 피드백을 결합한 통합적 접근을 설계하였다.
시스템은 6단계의 동작 절차(VISION, MOVE2GRASPPOS, FLIP, GRASP, ALIGN, PLACING)를 따라 블록을 인식·집기·정렬·배치한다. 비전 모듈은 두 대의 카메라를 활용하여 블록의 상태와 플랫폼의 동역학적 변화를 추정하고, IMM 칼만 필터를 통해 측정값의 신뢰도를 향상시켰다. 경로 탐색 알고리즘은 점수 행렬(score matrix)을 기반으로 충돌 위험, 거리, 안정성 기여도를 종합적으로 고려하여 최적 경로를 도출하였다. 또한, 제어 알고리즘은 가상 기준 블록(reference block) 개념을 도입하여 속도 벡터를 합성함으로써 불가피한 접촉을 제어 가능한 과정으로 전환하였다. 최종적으로 실시간 피드백 구조를 통해 엔드 이펙터와 목표 위치 간 오차를 보정하며 정밀도를 유지하였다.
개발 과정에서 MuJoCo 시뮬레이션을 활용하여 알고리즘을 사전에 검증하고, Dynamixel 서보모터와 스텝모터를 조합한 6자유도 로봇팔을 통해 실제 구현을 수행하였다. 그 결과, 1mm 내의 정밀도로 1.5 cm의 구멍 폭을 가지는 블록을 적층할 수 있었다.
본 연구는 단순한 블록 쌓기 게임을 넘어, 동적 환경에서의 정밀 조립이라는 난제를 해결할 수 있는 지능형 로봇 기술을 제시한다. 이는 향후 우주 구조물 조립, 초정밀 제조, 재난 현장 자동화 등 불안정한 조건에서의 로봇 응용 가능성을 확대하며, 연구·교육용 플랫폼으로서도 높은 활용 가치를 가진다.
담당부서학생행정실
전화번호880-2277