loaction
창의설계축전 공모작
모듈러 건축을 위한 자동화 로봇팔
-
참가 부문
-
학과
-
팀명
KDH Lab
-
신청자 이름
학생행정실
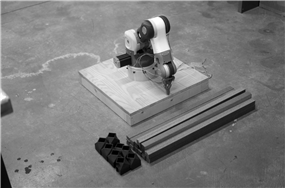
모듈러 건축은 공장에서 건물구조, 수로, 전기배선, 인테리어 등을 미리 조립하여 설치현장으로 차로 운송하여 설치하고 외장을 마감하는 건축법이다. 이는 기존 현장에서 이루어지는 건축방식보다 건물의 균일성 향상, 생산비용절감, 공기단축, 재활용 등이 가능해 ‘2020 한국 산업을 이끌 100대 기술’로 선정되는 등 최근 각광받는 건축법이다. 하지만, 아직도 공장 제조 시 사람이 직접 구조체에 올라가 조립하기 때문에 온전한 자동화가 되어있지 못하고, 안전문제, 제한된 숙련공의 수와 같은 단점이 있다. KDH팀은 이를 보완하기 위한 로봇팔로 모듈러 조립을 자동화하여 속도와 안전, 동일한 제품 퀄리티를 낼 수 있게 한다. 3D 프린터를 이용하여 모든 제품을 직접 제작하였으며, 모듈러 조립을 위한 특화된 그립부 설계와 인공지능 학습에 사용되는 알고리즘을 통한 최적화 경로 및 제어를 하였다. 이를 통해 로봇은 가공된 자재(H빔, 목재 등)를 조립부(조인트)와 결합하고 자재들을 서로 조립할 수 있게 된다. 로봇팔이 움직이는 방식은 치수를 link parameter 값으로 변환 및 행렬연산을 통해 원하는 좌표와 팔의 각도 사이의 관계를 알아내고 1차, 2차 함수 혼합 방식을 통해 로봇 경로를 계산한다. 본 작품에 사용되는 모터는 스텝모터로 open loop 제어가 가능하여 기어비계산을 덧붙혀서 각 경로에서의 로봇 팔 각도제어를 수행하였다. 본 작품에서는 제작여건상 1개의 팔로 시연되나, 컨베이어벨트와 여러 로봇팔과 결합 시 무인설비로 24시간 운영이 가능한 공장구성이 가능하다. 따라서 기존 모듈러 건축에서 소모되는 인력(인건비 및 위험수당 등)을 상당부분 아낄 수 있게 되며 낙상 등의 안전사고 해결도 가능하다.
담당부서학생행정실
전화번호880-2277