loaction
창의설계축전 공모작
Batpod의 자세제어 탐구
-
참가 부문
-
학과
-
팀명
Motorized Crown
-
신청자 이름
학생행정실
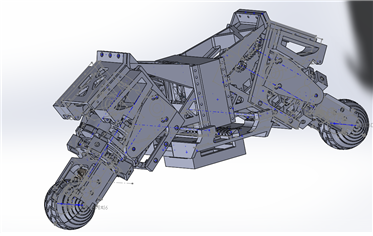
영화 ‘다크 나이트 라이즈’에 등장하는 오토바이인 Batpod의 특수 기동을 모방하는 로봇을 만들고 자세를 제어하고자 하였다. 이를 위해 이륜차형 로봇에 바퀴의 회전축을 360도 공전시키는 구조를 도입하였는데, 이는 기존의 omni wheel과는 달리 바퀴 하나에 2개의 모터의 동력을 전달해 자유도를 온전히 늘리며, 다양한 방향의 움직임을 적은 수의 바퀴를 이용해 얻을 수 있다는 장점을 가진다. MEMS 가속도계와 자이로스코프가 포함된 GY-521 센서와 모터 엔코더를 통해 얻어진 운동상태의 정보를 칼만필터로 처리해 정밀한 각도 정보를 추출해낸 후, 이를 바탕으로 로봇의 바퀴의 회전속도 변화, 바퀴축의 공전, 질량중심의 이동 등의 요소를 이용해 쓰러지지 않도록 자세를 제어하는 방식을 택했다.
이러한 정보를 처리하기에 아두이노로는 충분하지 않았으며, 따라서 아두이노와 라즈베리 파이를 연결해 아두이노를 pyFirmata 라이브러리를 통해 PWM 신호를 내보내 서보모터를 제어하는 Slave로 사용했다. 더 나아가 로봇을 무선으로 제어하기 위해 XBEE 모듈을 연결한 후 통신해 가속, 방향전환 및 드리프트의 세 가지 간단한 명령을 전달하고 그에 따라 자동으로 제어하는 방식을 채택하였다.
본 과제의 설계처럼 자유도를 높인 바퀴를 이용할 경우 기존 omni wheel보다 적은 개수로 복잡한 움직임을 만들어낼 수 있으며, 부품수가 적고 내구도가 높기 때문에 실용화에 적합해 자율주행차량에 폭넓은 대응의 선택지를 제공할 수 있을 거라 생각된다. 또한 이륜 차량의 자세를 제어하는 연구결과를 이용하면 세그웨이 같은 탈것의 자유도를 높이는 동시에 고속 이동을 가능하게 해 줄 것이다.
담당부서학생행정실
전화번호880-2277