loaction
창의설계축전 공모작
P.A.L
-
참가 부문
-
학과
-
팀명
서울 동역학
-
신청자 이름
학생행정실
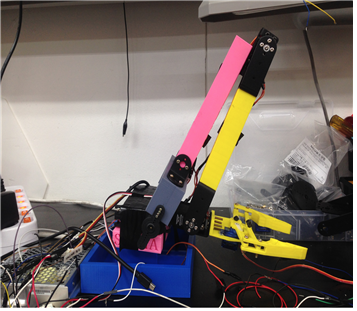
기존의 로봇팔 연구 및 제품들은 대개 제조업 산업, 혹은 정밀제어 산업 등에 쓰이고 있거나, 연구 및 교육 목적으로 사용 되고 있지만, 정작 일상생활 속에서의 상용과는 거리가 있다. 본 작품은 기존 로봇팔을 조금 더 일상생활에서 가깝게 쓸 수 있기 위한 방안 중 하나로서, 간단한 조작을 통해 물체를 인식하고, 물체의 위치를 확인 후 필요에 따른 작업을 수행하는 것을 기능으로 삼고 있다. 이 기능은 간단하지만 일상생활에서 가장 많이 보이고, 그만큼 높은 활용도를 가지고 있다(물품 정리, 테이블 청소 등등). 또한, 기존의 대다수 로봇팔 작품들은 직접 조종하거나 위치 좌표를 사용자가 파악하여 입력하는 방식인데에 비해, 본 작품은 사용가 직접 조종하거나 수동으로 위치를 파악하지 않고도 물체가 놓여있는 사진 혹은 영상에서 좌표값을 추출하여 이에 맞게 로봇팔의 각 모터들이 움직이는 방식으로 되어 있어 사용자가 쉽게 접할 수 있도록 설계하였다.
본 작품은 소형 서보모터 1개(집게), 중소형 서보모터 2개(수평 회전 및 팔꿈치) 및 중형 서보모터 2개(어깨)로 구성되어 있고, 구동 범위는 최대 0.7m가량으로, 설계의 단순함에 비해 넓은 구동범위를 제공한다. 물체 인식은 인텔의 OpenCV의 API를 활용해 물체의 윤곽을 그린 후 무게중심을 찾고, 이에 따라 모터에 계산된 각도 값을 입력하는 방식으로 구현하였다.
본 작품은 기본적으로 물체를 집거나 이동시키는 방식으로 구현되어있지만, 추후 액츄에이터를 발전시켜 추가적인 기능을 구현할 계획이다. 본 작품을 발판 삼아 다양한 산업에서 로봇팔을 활용해 로봇팔이라는 것이 일상생활에서도 가깝게 쓰이고, 사람들이 쉽게 접할 수 있게끔 하는 것을 기대해 볼 수 있다.
담당부서학생행정실
전화번호880-2277