loaction
창의설계축전 공모작
전방향 바퀴와 돌출형 흡입구를 이용한 꼼꼼한 청소 로봇 : 라이다 기반 제어와 비젼 기반 제어
-
참가 부문
-
학과
전기·정보공학부
-
팀명
공우
-
신청자 이름
김다현
현재 시중에 여러 종류의 로봇청소기가 나와있지만, 국내 사용 가정은 100명중 7명 꼴로 대중화에 성공하지 못했다. 독일의 소비자 설문조사에 따르면, ‘집안 구석구석을 철저하게 청소하지 못하는 점’이 가장 큰 취약점이라고 조사되었으며 청소 역량에 대한 소비자의 신뢰성 부족이 로봇 청소기 시장에 큰 장애가 되고 있다.
주 원인은 집안 구조의 복잡성에 비해 청소 방식에 한계가 있기 때문이다. 기존의 로봇청소기는 몸통 바닥에 흡입구를 가지고 있어 이동 경로가 곧 청소 영역이 되고, 대부분 원형 또는 사각형의 몸체를 가지고 있어 이동 경로에 제한이 있다. 따라서 청소 영역에 빈틈이 생긴다. 이를 보완하기 위해 브러쉬가 달린 모델들이 출시되었지만, 이는 간접적인 해결책일 뿐 오히려 먼지가 사방으로 퍼지거나, 코너를 청소하지 못하는 문제는 여전히 존재한다. 또한, 기존 바퀴는 기동성의 낮은 자유도로 임의의 표면에 대해 온전한 청소가 보장되지 않는다. 더불어 로봇청소기와 사용자 간의 직관적인 상호작용의 부재가 신뢰성을 낮춘다. 일부 제품에서 조종 기능을 추가했지만 직관적이지 못한다는 단점이 존재한다.
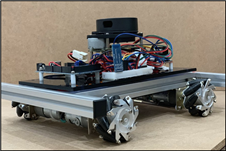
본 프로젝트에서는 돌출형 흡입구를 이용하여 근본적인 해결방안을 제시하고 전(全) 방향 바퀴인 메카넘 휠을 활용하여 구동의 자유도를 높였다. 또한, 딥러닝 모델을 활용한 HRI(Human Robot Interaction) 플랫폼을 제안하여 사용자의 신뢰성 증진을 도모한다. 본 로봇은 차세대 로봇 청소기의 발전 방향을 제시한다.
담당부서학생행정실
전화번호880-2277