loaction
창의설계축전 공모작
직렬 형태의 스크류 구동방식의 탐사 로봇 개발
-
참가 부문
-
학과
-
팀명
나선지렁이
-
신청자 이름
학생행정실
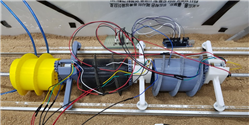
Screw-Propelled Drive 방식은 파이프와 같은 좁고 긴 지형과 유체로 된 지형을 이동 및 탐사하는데 큰 이점을 지닌다. 현재 우리사회는 파이프를 가진 기반시설 혹은 공공시설들을 다수 지니고 있다. 일상에서 가장 가까이에 있는 상하수도관 들이 있으며, 공장 등에서 환기 혹은 수도, 폐수처리 등을 위해 다량의 pipe-line을 사용하고 있다. 사회가 점점 고도화되고 복잡해질수록 또 설비의 복잡도가 증가하면 증가할수록 이러한 pipe-line의 사용은 점점 더 많아질 것으로 보이며, 그 유지 관리는 더욱 어려워질 것으로 보인다. 이러한 상황에서 사람을 대신하여 탐사하고 유지보수가 필요한 곳을 빠르게 찾아낼 수 있는 로봇을 배치하는 것은 빠른 유지 보수를 통하나 사회적 비용 절감 및 사람들로 하여금 탐사 도중 위험에 빠지는 사태를 방지해줄 수 있는 좋은 대안이 될 것으로 보인다. 또한 추가적인 장치 혹은 형태를 변형시킬 경우 pipe-line 상 막힌 부분을 뚫어 줄 수도 있다는 점에서 상당히 유용할 것으로 보인다. 이에 우리는 Screw-Propelled Drive 구동방식의 로봇을 연구 및 제작하여 사회에 이바지하고자 한다.
담당부서학생행정실
전화번호880-2277