loaction
연구성과
A 'Flying Carpet' in the Water? SNU Professor Kyu-Jin Cho's Team Develops Underwater Soft Robot Imitating Leaf Movement
-
작성자
관리자
-
등록일
2021.05.10.
-
조회수
986
A 'Flying Carpet' in the Water?
SNU Professor Kyu-Jin Cho's Team Develops Underwater Soft Robot Imitating Leaf Movement
SNU Professor Kyu-Jin Cho's Team Develops Underwater Soft Robot Imitating Leaf Movement
- Inspired by the fluttering of leaves, published in <Science Robotics>,
a renown magazine in the field of robots.
- Suggests new concepts that can be applied to solving marine environmental problems
such as oil spills.
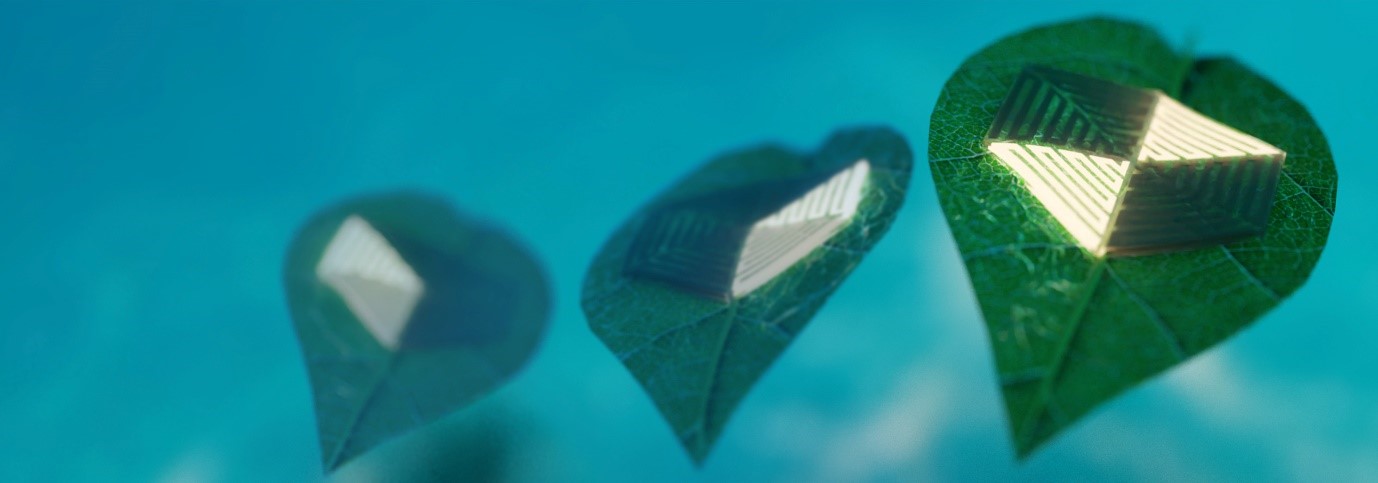
▲ A prototype of a swimming leaf robot inspired by the fluttering movement of leaf during its dropping

▲ (First row from left) Professor Kyu-Jin Cho of Seoul National University’s Department of Mechanical Engineering, Postdoctoral researcher Junghwan Byun of Germany’s Max Planck Research Institute, Seoul National University Researcher Minjo Park, Researcher Sang-Min Baek, Researcher Woong-Bae Kim. (Second row from left) Professor Yongtaek Hong of Seoul National University’s Department of Electrical and Computer Engineering, Researcher Jaeyoung Yoon, Dr. Byeongmoon Leea renown magazine in the field of robots.
- Suggests new concepts that can be applied to solving marine environmental problems
such as oil spills.
▲ A prototype of a swimming leaf robot inspired by the fluttering movement of leaf during its dropping
Seoul National University's College of Engineering (Dean Kookheon Char) announced on April 22 that a joint research team led by Professor Kyu-Jin Cho (Human-Centered Soft robotic Future Technology Center) has developed paper-thin underwater soft robot technology.
The researchers succeeded in developing a technique to control density distribution in thin skin forms to create a new form of underwater behavior with paper-thin structures. This achievement was published on April 21 in <Science Robotics>, a world-renowned journal on robotics, in recognition of its research suggesting the new form and functionality of underwater soft robots.
The researchers were inspired by the core principle of "the movement of leaves fluttering and falling in the air," a phenomenon that is easily accessible to anyone on a daily basis. Light and thin objects, such as leaves or paper, produce dynamic movements without any special thrust due to air resistance.
The researchers found that this movement relies heavily on the density distribution of objects, and that this effect is further maximized in underwater environments. Furthermore, they succeeded in actively controlling the density distribution of the entire system by patterning ductile composites that change their densities by a large margin in response to heat. This density distribution control technique allows any paper-thin structure to move to a desired position without extreme deformation of the body or propellers, with underwater movements similar to that of fluttering leaves.
The technology can be utilized extensively, ranging from small millimeter-level sizes to large areas of more than a few meters, and has the potential to aggregate a variety of functions necessary for exploration and maintenance of the marine environment. To demonstrate this potential, the researchers showcased the concept in small water tanks, showing how oil adsorption sheets swim on their own to reach regions of oil spill to remove pollutants. Although it is not yet equipped with batteries or electronic circuits and needs further research on movement control in floating water, it is expected to show new possibilities for underwater soft robots if it develops current conceptual research.
"This is the first study to have a soft robot show a new type of behavior similar to the movement of leaves underwater, and if this is to be further developed in the future, it would surely be possible to develop a new type of underwater soft robot that can eliminate marine pollution and waste," said Professor Kyu-Jin Cho, head of research at Seoul National University.
This study was conducted with the support of the Korea Research Foundation's Leading Research Center Project and Basic Research Project Academic Successor Generation Project.
[Reference materials]
1. Pictures
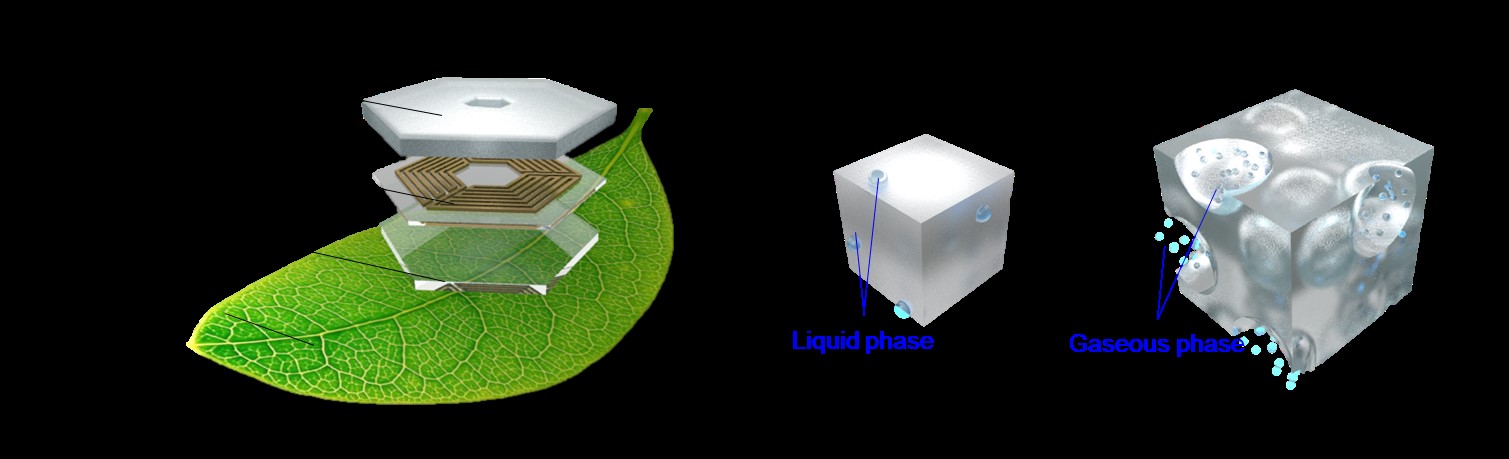
▲ a, A schematic diagram of a skin-type buoyancy control technology developed by the research team and a swimming leaf using its principle. b, buoyancy control principle. A structure in which a gas with a low boiling point is inserted inside an elastomer (a polymer compound that is highly affected by external forces) reacts to heat to create a large volume change to control buoyancy.
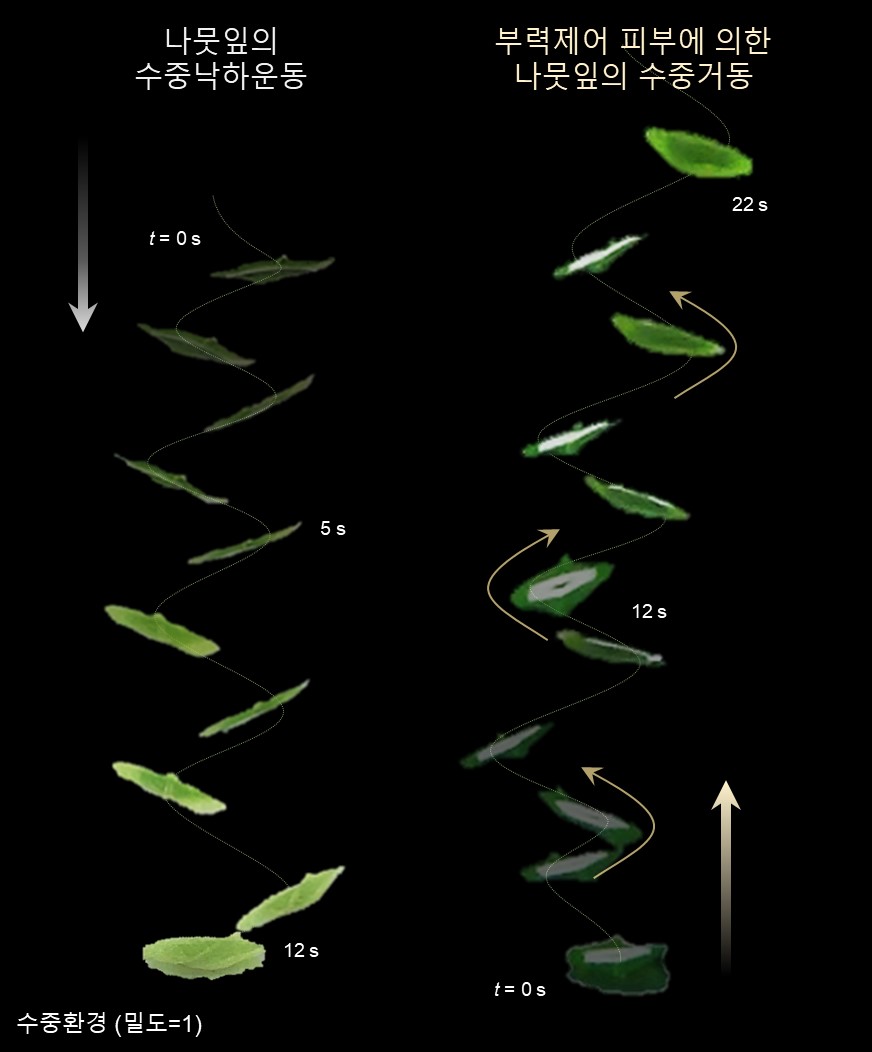
▲ Underwater movement of a leaf robot, inspired by the fluttering motion of falling leaves
2. YouTube Video
https://youtu.be/M5XtojuUSBs
3. Research Paper and Authors
- Title of the research paper: Underwater maneuvering of robotic sheets through buoyancy-mediated active flutter
- Authors: Professor Kyu-Jin Cho (Corresponding author, Seoul National University), Dr. Junghwan Byun (First author, Seoul National University, Germany’s Max Planck Research Institute), Minjo Park (Seoul National University), Sang-Min Baek (Seoul National University), Jaeyoung Yoon (Seoul National University), Woong-Bae Kim (Seoul National University), Dr. Byeongmoon Lee (Seoul National University), Professor Yongtaek Hong (Seoul National University)
파일
1.jpg
담당부서대외협력실
전화번호880-9148