- About
- Academics
-
Undergraduate Programs
- Civil and Environmental Engineering
- Architecture and Architectural Engineering
- Mechanical Engineering
- Industrial Engineering
- Energy Resources Engineering
- Nuclear Engineering
- Materials Science and Engineering
- Electrical and Computer Engineering
- Naval Architecture and Ocean Engineering
- Computer Science and Engineering
- Aerospace Engineering
- Chemical and Biological Engineering
-
Graduate Programs
- Civil and Environmental Engineering
- Architecture and Architectural Engineering
- Mechanical Engineering
- Industrial Engineering
- Energy Systems Engineering
- Materials Science and Engineering
- Electrical and Computer Engineering
- Naval Architecture and Ocean Engineering
- Computer Science and Engineering
- Chemical and Biological Engineering
- Aerospace Engineering
- Interdisciplinary Program in Technology, Management, Economics and Policy
- Interdisciplinary Program in Urban Design
- Interdisciplinary Program in Bioengineering
- Interdisciplinary Program in Artificial Intelligence
- Interdisciplinary Program in Intelligent Space and Aerospace Systems
- Chemical Convergence for Energy and Environment Major
- Multiscale Mechanics Design Major
- Hybrid Materials Major
- Double Major Program
- Open Programs
-
Undergraduate Programs
- Research
- Campus Life
- Communication
- Prospective Students
- International Office
SNU Professor Yong-Lae Park’s Team Develops Artificial Muscle Embedded with Soft Sensors that Mimic Organic Sensors of Biological Muscles
-
Uploaded by
관리자
-
Upload Date
2019.10.21
-
Views
690
SNU Professor Yong-Lae Park’s Team Develops Artificial Muscle Embedded with Soft Sensors that Mimic Organic Sensors of Biological Muscles
- Re-enaction of soft human- and animal-like movements through delicate control of robotic muscles
- Published as the cover paper for 'Soft Robotics', an international journal on soft robots
▲ (From left) Professor Yong-Lae Park of the SNU Department of Mechanical and Aerospace Engineering, ‘Soft Robotics’ Cover Page
SNU College of Engineering (Dean Kookheon Char) announced on the 20th that Yong-Lae Park, Professor of the SNU Department of Mechanical and Aerospace Engineering, and his team has developed artificial muscles embedded with soft sensors that simulate the proprioceptive organs of biological muscles. This latest research work has made it possible for robots to control muscle units, opening the scope for developing soft robots that replicate human- and animal-like movements
.
The soft sensors used for this research are very thin and elastic in nature, having the advantages of being aptly utilized for motor control of muscles without significantly influencing muscle size and weight. Further, since the artificial muscle has been made into flat patch-like structures, the volume has been compactly minimalized, making it possible to develop soft robots with various small and large muscles, just like that of human beings.
In biological muscles, there exist muscle spindles and Golgi tendon organs which are proprioceptors that detect the length and force of contractions when muscles are at work. Humans or animals can control their muscles through the action of these receptors to induce the body's desired movement or force.
So far, robots have only controlled the overall movement or strength of sensors, and there have been limitations in creating collaborative movements by delicately controlling the actuator itself. Professor Yong-Lae Park’s team, wishing to overcome this limitation, embedded soft sensors simulating the muscle spindle and Golgi tendon organs of biological muscles directly into the pneumatic artificial muscle using a liquid conductor, allowing the contraction length and force of artificial muscles to be measured simultaneously. Using the feedback signal from the soft sensors embedded to each muscle in real-time, the robot is able to implement the delicate and smooth movements of humans.
In joint research with Carnegie Mellon University of the U.S., Professor Yong-Lae Park and his team’s findings were published in the August issue of ‘Soft Robotics’, an international soft robotics journal. The paper is titled 'Sensorized, Flat, Pneumatic, Artificial Muscle Embedded with Biomimetic Microfluidic Sensors for Proprioceptive Feedback'.
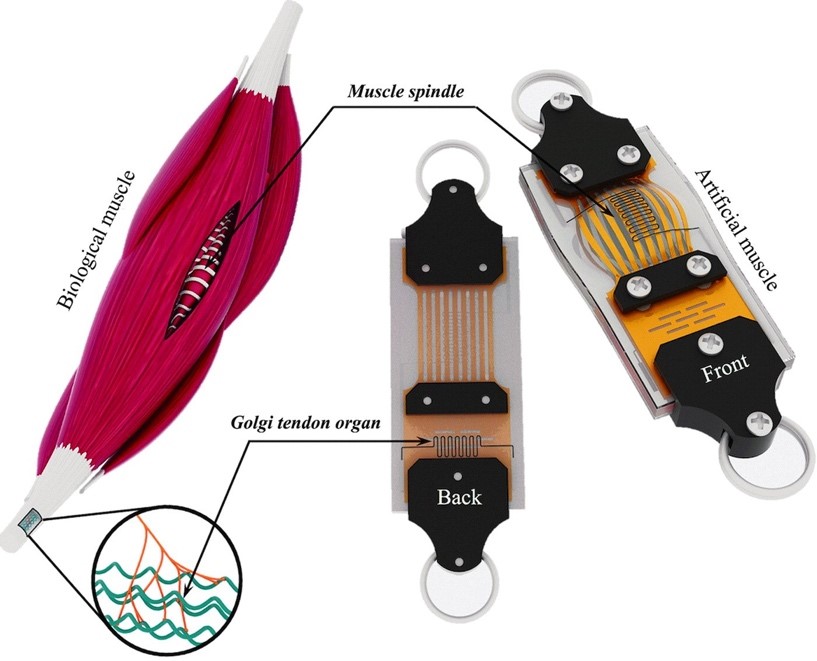
▲ Figure 1. Schematic comparison of proprioreceptors in artificial muscles with biological muscles
[References]
Research Paper: https://www.liebertpub.com/doi/10.1089/soro.2018.0110
J. Wirekoh, L. Valle, N. Pol, and Y.-L. Park, “Sensorized, Flat, Pneumatic Artificial Muscle Embedded with Biomimetic Microfluidic Sensors for Proprioceptive Feedback,” Soft Robotics, 2019.