loaction
- About
-
Academics
-
Undergraduate Programs
- Civil, Urban and Environmental Engineering
- Architecture and Architectural Engineering
- Mechanical Engineering
- Industrial Engineering
- Energy Resources Engineering
- Nuclear Engineering
- Materials Science and Engineering
- Electrical and Computer Engineering
- Naval Architecture and Ocean Engineering
- Computer Science and Engineering
- Aerospace Engineering
- Chemical and Biological Engineering
-
Graduate Programs
- Civil, Urban and Environmental Engineering
- Architecture and Architectural Engineering
- Mechanical Engineering
- Industrial Engineering
- Energy Systems Engineering
- Materials Science and Engineering
- Electrical and Computer Engineering
- Naval Architecture and Ocean Engineering
- Computer Science and Engineering
- Aerospace Engineering
- Chemical and Biological Engineering
- Interdisciplinary Program in Technology, Management, Economics and Policy
- Interdisciplinary Program in Urban Design
- Interdisciplinary Program in Bioengineering
- Interdisciplinary Program in Artificial Intelligence
- Interdisciplinary Program in Intelligent Space and Aerospace Systems
- Chemical Convergence for Energy and Environment Major
- Multiscale Mechanics Design Major
- Hybrid Materials Major
- Double Major Program
- Open Programs
-
Undergraduate Programs
- Research
- Prospective Students
- Campus Life
- International Office
- Communication
News
Slime-Like Robots from Sci-Fi Become Reality: SNU Researchers Develop Next-Generation Artificial Muscle That Dynamically Reconfigures and Self-Heals
-
Uploaded by
대외협력실
-
Upload Date
Mar 20, 2026
-
Views
995
Slime-Like Robots from Sci-Fi Become Reality:
SNU Researchers Develop Next-Generation Artificial Muscle That Dynamically Reconfigures and Self-Heals
- World’s First Demonstration of ‘Phase-Transitional Ferrofluid Electrodes’ Bridging Liquid and Solid States
- Recoverable and Reusable After Failure, Presenting a ‘Sustainable’ Paradigm for Soft Robotics
- Published in the Prestigious Journal Science Advances

▲ (From left) Yun Hyeok Lee, PhD; Seungwon Moon, PhD candidate; Min-gyu Lee, PhD; Prof. Ho-Young Kim, Department of Mechanical Engineering, Seoul National University; and Prof. Jeong-Yun Sun , Department of Materials Science and Engineering, Seoul National University
Breaking away from conventional robots that perform only predefined functions once fabricated, researchers have developed a next-generation artificial muscle that can change its shape in real time, recover from damage, and even be reused.
Seoul National University College of Engineering announced that a joint research team led by Prof. Jeong-Yun Sun (Department of Materials Science and Engineering) and Prof. Ho-Young Kim (Department of Mechanical Engineering), with Yun Hyeok Lee, Seungwon Moon, and Min-gyu Lee as first and co-first authors, has developed a new type of dielectric elastomer actuator (DEA) using a phase-transitional ferrofluid (PTF) that behaves as a solid at room temperature but becomes fluid-like and highly flexible when exposed to external stimuli such as heat or magnetic fields.
The study was published on March 21 in Science Advances, a leading international journal published by the American Association for the Advancement of Science (AAAS).
Dielectric elastomer actuators (DEAs) are soft transducers that convert electrical energy into mechanical motion and are often referred to as artificial muscles because of their ability to move rapidly and precisely like human muscles.
Artificial muscles based on dielectric elastomers are soft and lightweight, and have increasingly been applied in daily lives and industrial settings, including haptic vibration components in smart and wearable devices, as well as soft robotic grippers capable of safely handling delicate objects such as fruits or fragile components.
However, once the electrode pattern is designed and printed, its shape becomes permanently fixed, meaning that such systems can only perform a single, predefined motion.
As a result, whenever a robot needs to grasp objects of different shapes or adapt to new environments, both industry and academia have been required to redesign and fabricate entirely new electrode patterns from scratch. This has led to significant manufacturing costs and inefficiencies, and has remained a major barrier to the commercialization of versatile, multifunctional soft robots.
To overcome these limitations, Lee et al. developed a next-generation soft gel actuator capable of dynamically reconfiguring electrode patterns in real time, performing new functions as needed, and recovering even after mechanical damage or electrical failure.
The newly developed phase-transitional ferrofluid (PTF) electrode can dynamically split and merge into three-dimensional configurations. Even after fabrication, its shape and position can be freely adjusted, significantly expanding the functional capabilities of soft robots beyond fixed, predesigned motions. In addition, the electrode’s self-healing and recyclability enhance the sustainability of robotic systems.
A key achievement of this study lies in the seamless integration of advanced materials engineering, through the precise combination of nanoparticles and polymers, with a fully functional mechanical system. Materials engineering enabled the development of a stable yet flexible phase-transitional electrode, while mechanical engineering demonstrated how the material operates during actuation, reconfiguration, and recovery.
As a result, a single soft actuator can now perform entirely different roles depending on the situation, transforming conventional soft robots into adaptive systems capable of altering their functions in response to changing environments and tasks.
○ Key Features of the Phase-Transitional Ferrofluid (PTF) Electrode |
This research represents a transformative step toward ending the era of passive and disposable machines, introducing instead a new class of sustainable, adaptive systems capable of continuous regeneration and self-reconfiguration. The technology has broad potential applications, ranging from highly advanced artificial muscles capable of replicating complex, multi-degree-of-freedom human movements, to next-generation form-factor displays that can dynamically alter shape and information in real time, and smart robots that can repair themselves while operating in extreme industrial environments involving electrical failure or physical damage.
Furthermore, by enabling electrodes to be extracted and reused rather than discarding entire devices at the end of their lifespan, the study proposes a fundamentally new, environmentally sustainable resource circulation paradigm that could significantly impact future soft robotics and next-generation electronics industries.
Prof. Jeong-Yun Sun stated, “This study represents a breakthrough in transforming traditionally static and passive electrodes into ‘living, programmable elements’ through innovations in particle and polymer design. This self-healing and shape-reconfigurable electrode technology will serve as a key foundation for sustainable next-generation soft robotics.”
Prof. Ho-Young Kim added, “From a mechanical engineering perspective, achieving high degrees of freedom in soft robots, similar to human muscles, requires structural flexibility. Through interdisciplinary integration with materials engineering, we demonstrated that a single robotic structure can generate virtually limitless modes of motion.”
Yun Hyeok Lee, who received his PhD from SNU’s Department of Materials Science and Engineering, is currently conducting postdoctoral research at the Massachusetts Institute of Technology (MIT), focusing on the development of new platform materials using nanoparticles, DNA, and polymers.
Seungwon Moon, a PhD candidate in the same department, is currently working on the development of high thermal conductivity polymer materials for semiconductor and electronic device applications.
Min-gyu Lee received his PhD from SNU and is now working at Samsung Electronics’ Semiconductor Research Center, where he is involved in the development of next-generation high-bandwidth memory (HBM).
This research was conducted with support from the Ministry of Science and ICT and the National Research Foundation of Korea through the Mid-career Researcher Program, the Future Promising Fusion Technology Pioneer Program, and the Global Leader Grants.
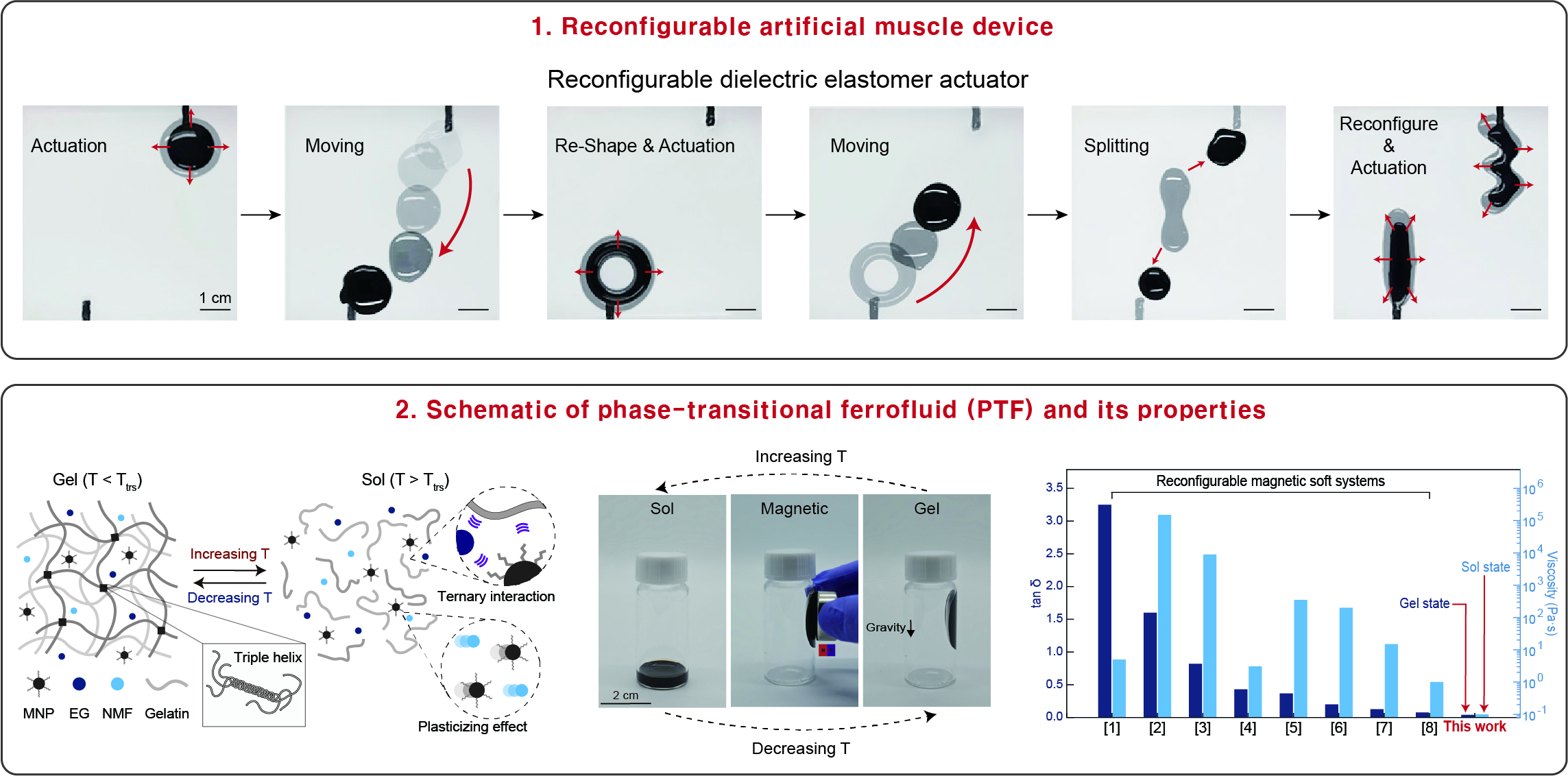
▲ Figure 1. Operation and applications of a reconfigurable next-generation artificial muscle device and physical properties of the phase-transitional ferrofluid
(1) A reconfigurable artificial muscle device capable of performing multiple functions through repeated phase transitions and magnetic responsiveness of slime-like ferrofluid electrodes.
(2) Schematic illustration and physical characteristics of the phase-transitional ferrofluid, demonstrating reversible solid-liquid phase transitions and the integration of high elasticity and low viscosity within a single material.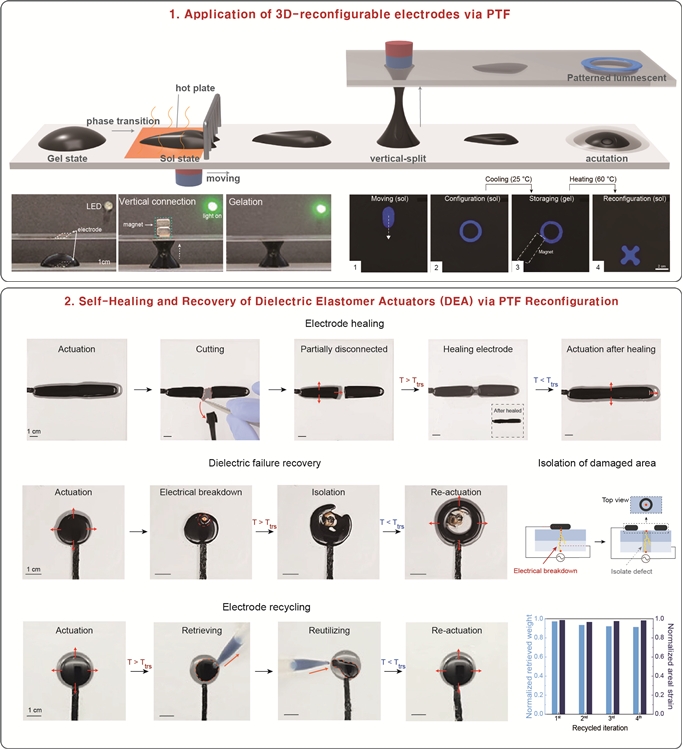
▲ Figure 2. Functional expansion of reconfigurable electrodes and artificial muscle devices using phase-transitional ferrofluid
(1) Three-dimensional reconfigurable electrodes enabled by PTF, allowing the realization of next-generation artificial muscle devices and freely reconfigurable displays.
(2) Self-healing and repair of artificial muscles through PTF reconfiguration, enabling continued operation after electrode damage and allowing recovery and reuse to enhance device sustainability.
[Reference Materials]
- Title/Journal : A reconfigurable dielectric elastomer actuator via phase-transitional ferrofluid enables sustainable operation, Science Advances
- DOI : https://www.science.org/doi/10.1126/sciadv.aeb7409
[Contact Information]
Yun Hyeok Lee, Researcher, Research Institute of Advanced Materials, Seoul National University / wntkd96@snu.ac.kr