loaction
- About
-
Academics
-
Undergraduate Programs
- Civil, Urban and Environmental Engineering
- Architecture and Architectural Engineering
- Mechanical Engineering
- Industrial Engineering
- Energy Resources Engineering
- Nuclear Engineering
- Materials Science and Engineering
- Electrical and Computer Engineering
- Naval Architecture and Ocean Engineering
- Computer Science and Engineering
- Aerospace Engineering
- Chemical and Biological Engineering
-
Graduate Programs
- Civil, Urban and Environmental Engineering
- Architecture and Architectural Engineering
- Mechanical Engineering
- Industrial Engineering
- Energy Systems Engineering
- Materials Science and Engineering
- Electrical and Computer Engineering
- Naval Architecture and Ocean Engineering
- Computer Science and Engineering
- Aerospace Engineering
- Chemical and Biological Engineering
- Interdisciplinary Program in Technology, Management, Economics and Policy
- Interdisciplinary Program in Urban Design
- Interdisciplinary Program in Bioengineering
- Interdisciplinary Program in Artificial Intelligence
- Interdisciplinary Program in Intelligent Space and Aerospace Systems
- Chemical Convergence for Energy and Environment Major
- Multiscale Mechanics Design Major
- Hybrid Materials Major
- Double Major Program
- Open Programs
-
Undergraduate Programs
- Research
- Prospective Students
- Campus Life
- International Office
- Communication
News
Professor Kyu-Jin Cho's Research Team of the Department of Mechanical Engineering at Seoul National University Developed a Non-Motorized Variable-Elastic Exo Suit
-
Uploaded by
관리자
-
Upload Date
Sep 03, 2021
-
Views
920
Professor Kyu-Jin Cho's Research Team of the
Department of Mechanical Engineering at
Department of Mechanical Engineering at
Seoul National University Developed a Non-Motorized Variable-Elastic Exo Suit
- Demonstrating improvement in motion patterns along with human muscle strength support
- Published on August 25 in the renowned international journal 'Science Robotics'
- Published on August 25 in the renowned international journal 'Science Robotics'

▲ Representative photo of the developed non-motorized variable elastic exosuit
Seoul National University's College of Engineering (Dean Kookheon Char) announced on August 26 (Thursday) that a joint research team of Professor Kyu-Jin Cho (Director of the Human-Centered Soft Robotics and Bionics Laboratory) and researcher Sung-Sik Yun of the Department of Mechanical Engineering along with co-authors Professor Keewon Kim of the Department of Rehabilitation Medicine at the Seoul National University Hospital and Professor Jooeun Ahn of the Department of Physical Education at Seoul National University has succeeded in developing a non-motorized variable elastic exo suit that induces a lift motion into a squat form with low risk of injury.
This achievement was recognized as a study that suggested the possibility of improving motion patterns as well as supporting human muscle strength using exo suits, and was published on August 25 in the renowned international journal 'Science Robotics'.
Because lifting heavy objects places a lot of strain on the lower back and can cause injuries, in many workplaces or gyms, squat lifting - in which the object is lifted by bending the knee instead of stoop lifting - is recommended to prevent injuries.
However, due to the structure of the human body, people often feel more comfortable with the stooping movement and it is often already habituated, thus long-term training must be accompanied to correct the lifting movement. Until now, most wearable devices used for posture correction have been limited to fixing and compressing the waist. However, in order to ensure safe lifting, a wearable device capable of inducing a desirable squat motion by moving a number of joints such as the back, hip, and knee in unison is necessary.
In response, Professor Kyu-Jin Cho's research team developed the world's first exo suit whose impedance (stretchability) changes according to the movement taken by the wearer. "The core of the design of such suits is the 'body-powered variable impedance' technology developed by this research team," said Sung-Sik Yun, who developed the exo suit.
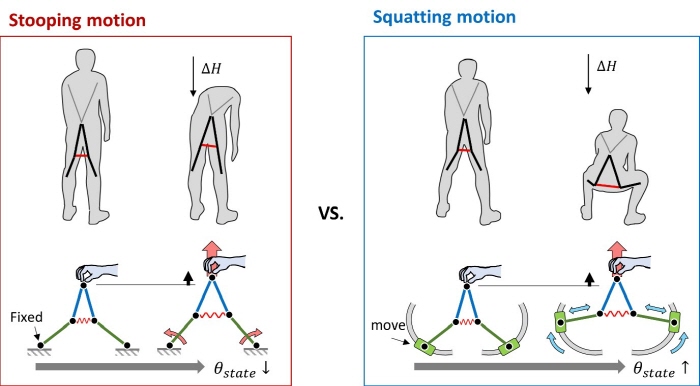
▲ Changes in the shape of the exo suit during the stoop movement versus the squat movement
The exo suit developed with this technology is a full-body suit made of flexible materials such as fabric, straps and rubber bands and does not require any power source. (Weight of the first prototype: 850 g). When the wearer stretches his legs and bends his back, the exo suit loses elasticity and makes the wearer feel uncomfortable during the stoop movement. Here, the exo suit acts as a brake that suppresses the incorrect lifting posture.
On the other hand, when the wearer straightens his back and bends his knees, the exo suit increases flexibility, allowing the wearer to perform the squatting position comfortably. In addition, the energy stored in the rubber band during the expansion of the suit acts as an auxiliary force when lifting an object, helping the wearer perform squats with less force. By changing the elastic band of the exo suit depending on the purpose of use, the suit can be set to help the wearer lift more or less. (In the setting used in the experiments of this paper, the suit stores/releases 3 to 4 J of elastic energy during squats and helps the spine to stand up and extend the hip joint with a force of 100~150 N. It can assist about 10% of the strength required for squats.)
Experiments have shown that this exo suit, which provides greater flexibility and ease of movement as one's motion approaches the squat form, induces the wearer to voluntarily improve their lift motion. In an experiment involving 10 people who had no previous experience with using the exo suits, 9 out of 10 people improved their lift posture toward a squat-like shape immediately after wearing the suits. (35% improvement in average squat indicators for 10 people)
In addition, 9 out of 10 people were able to reduce the metabolic energy consumed during squats through the use of the suits due to their ability to store and release elastic energy. (Reducing the average metabolic energy consumption of 10 people by 5.3%). This action of the exo suit is expected to reduce back injuries and increase work efficiency for workers during lifting operations.
Further, the 'body-driven variable impedance' technology developed in this study is not just limited to lifting, but has the potential to be improved to meet the characteristics of various exercise fields. For example, it is important to implement correct full body movements in various fields, including movements during one's daily life such as 'walking and running' or movements during sports such as 'golf and swimming'.
“The technology developed by the research team is expected to develop into clothing that is applied to various tasks and sports in the future to induce correct movements which can contribute to improving the wearer’s capabilities, preventing injuries or alleviating pain,” said Professor Kyu-Jin Cho, a research director.