- About
- Academics
-
Undergraduate Programs
- Civil and Environmental Engineering
- Architecture and Architectural Engineering
- Mechanical Engineering
- Industrial Engineering
- Energy Resources Engineering
- Nuclear Engineering
- Materials Science and Engineering
- Electrical and Computer Engineering
- Naval Architecture and Ocean Engineering
- Computer Science and Engineering
- Aerospace Engineering
- Chemical and Biological Engineering
-
Graduate Programs
- Civil and Environmental Engineering
- Architecture and Architectural Engineering
- Mechanical Engineering
- Industrial Engineering
- Energy Systems Engineering
- Materials Science and Engineering
- Electrical and Computer Engineering
- Naval Architecture and Ocean Engineering
- Computer Science and Engineering
- Chemical and Biological Engineering
- Aerospace Engineering
- Interdisciplinary Program in Technology, Management, Economics and Policy
- Interdisciplinary Program in Urban Design
- Interdisciplinary Program in Bioengineering
- Interdisciplinary Program in Artificial Intelligence
- Interdisciplinary Program in Intelligent Space and Aerospace Systems
- Chemical Convergence for Energy and Environment Major
- Multiscale Mechanics Design Major
- Hybrid Materials Major
- Double Major Program
- Open Programs
-
Undergraduate Programs
- Research
- Campus Life
- Communication
- Prospective Students
- International Office
News
Professor Kyu-Jin Cho's Research Team at Seoul National University developed a gripper to move multiple objects together, anticipating improved efficiency in logistics and manufacturing processes
-
Uploaded by
대외협력실
-
Upload Date
2024.12.12
-
Views
1,091
Professor Kyu-Jin Cho's Research Team at Seoul National University developed a gripper to move multiple objects together, anticipating improved efficiency in logistics and manufacturing processes
MOGrip: A Gripper That Picks Up Objects One by One and Moves Them All at Once, Like a Human
▲ (From left to right) Ph.D. Candidate Sung Yol Yu (second author), Ph.D. Candidate Jaemin Eom (first author), Professor Kyu-Jin Cho (advisor), Bachelor's Student Kristine Yoonseo Lee (co-author), and Master's Student Chunghoon Park (co-author)
Seoul National University College of Engineering announced that a research team directed by Professor Kyu-Jin Cho from the Department of Mechanical Engineering has proposed a gripper capable of moving multiple objects together to enhance the efficiency of pick-and-place processes, inspired from humans’ multi-object grasping strategy. The gripper not only transfers multiple objects at once but also places individual objects at desired locations. This achievement was published in the journal Science Robotics on December 12, recognized for analyzing human motion principles and successfully applying them to a robotic gripper.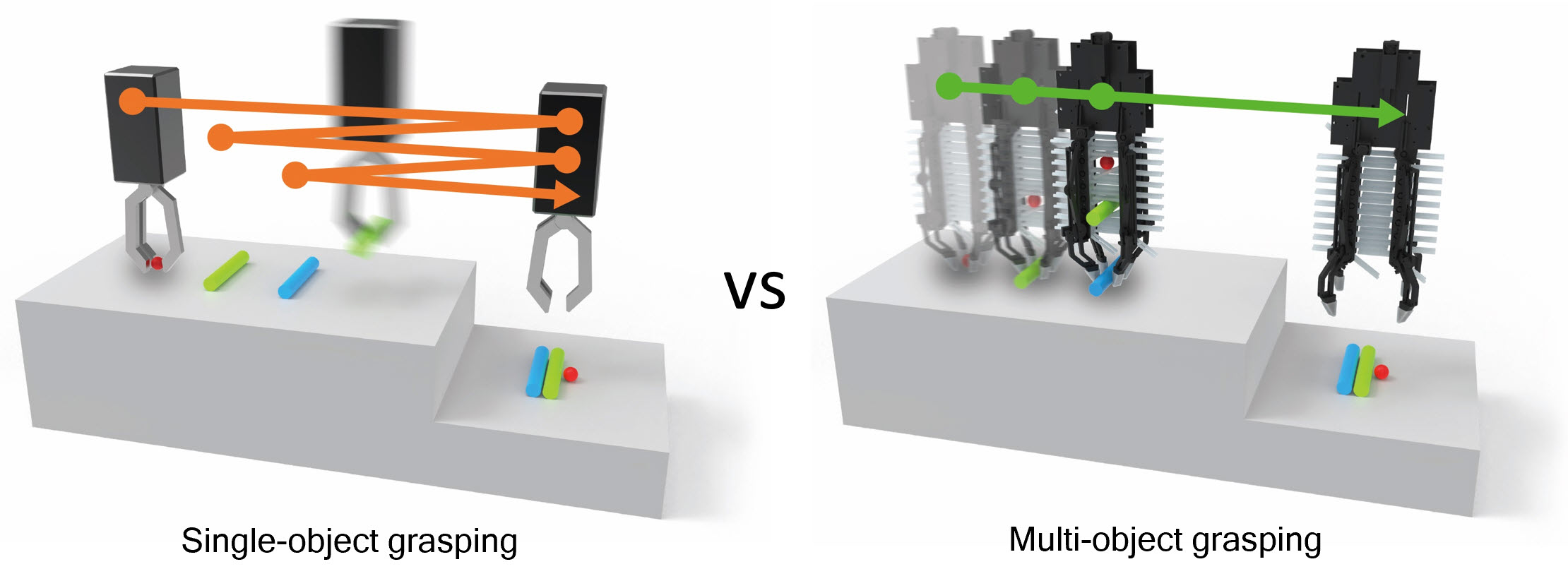
▲ (Figure 1) Comparison between the single-object grasping method of conventional grippers and the multi-object grasping method of the developed gripper : Compared to the single-object grasping method, the multi-object grasping method can significantly reduce the travel distance of the robotic arm required for pick-and-place tasks, thereby decreasing the overall process time.
This research was motivated by the human grasping strategy called “multi-object grasping,” which involves transferring multiple objects at once. The team stated that the study began in 2019 after observing factory workers who, instead of moving objects individually, transferred multiple items simultaneously to enhance the efficiency of the pick-and-place process. Professor Kyu-Jin Cho explained, “Unlike humans, conventional gripper designs have predominantly focused on transferring a single object at a time. While grippers for multi-object grasping have been developed, they typically consist of multiple small grippers arranged at the end of a robotic arm, restricting their use to highly structured environments.”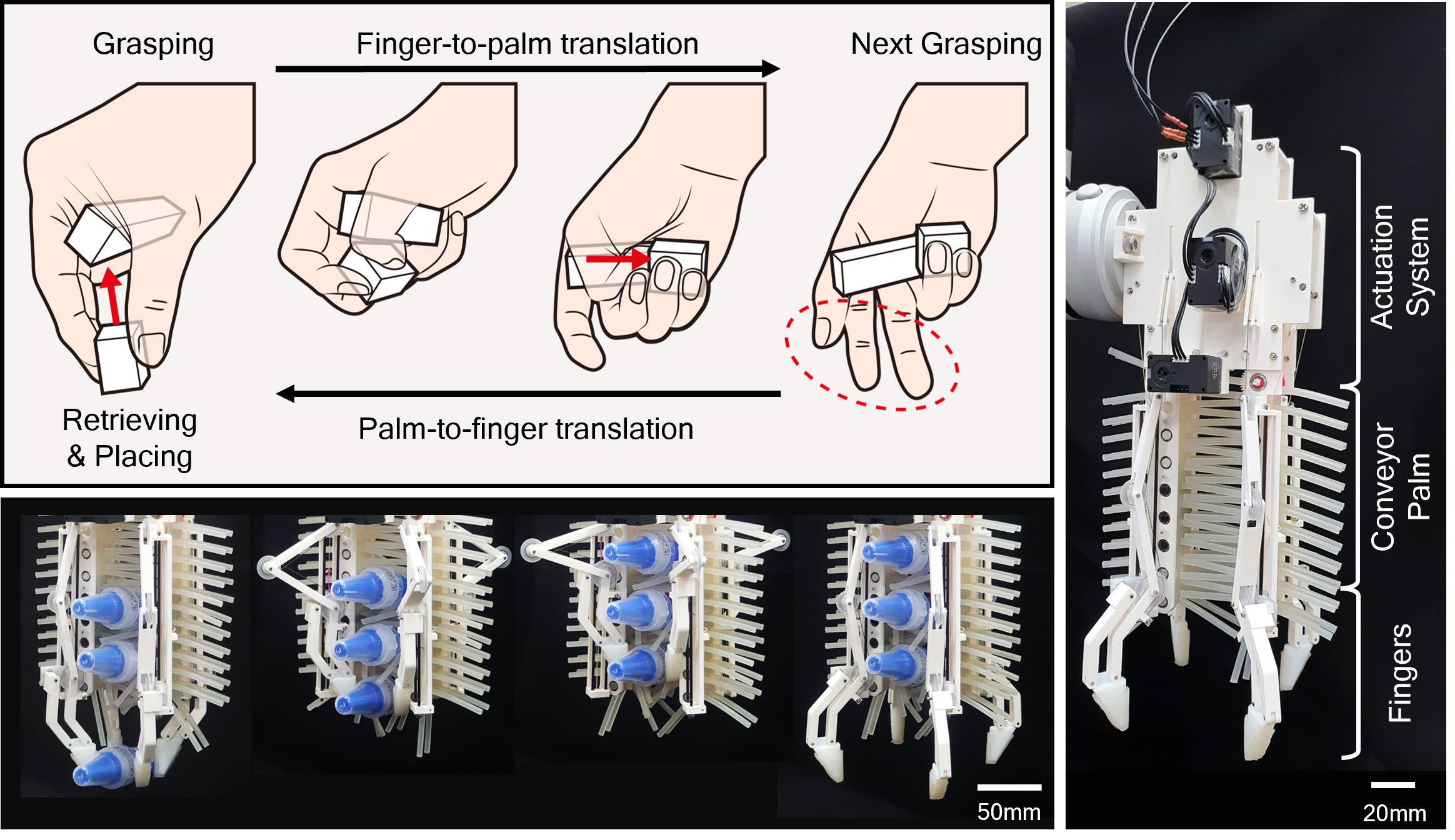
▲ (Figure 2) Human multi-object grasping strategy and the developed gripper : Humans can repeatedly grasp and store objects one by one using finger-to-palm translation, allowing multiple objects to be stored simultaneously. After moving multiple objects, they can retrieve and place them individually using palm-to-finger translation. Inspired by these motions, researchers at Seoul National University proposed a gripper capable of multi-object grasping in unstructured environments.
Therefore, the research team analyzed the human multi-object grasping strategy, which is applicable in unstructured environments, and developed a gripper that mimics this capability. This gripper can sequentially grasp objects, store them, transfer multiple items simultaneously, and place them individually at desired locations. To transfer multiple objects in unstructured environments, humans grasp individual objects with their fingers and translate them to the palm for storage. This action is known as finger-to-palm translation. Finger-to-palm translation frees the fingertips to grasp new targets and can be repeated to simultaneously store multiple objects in the palm. After transferring multiple stored objects at once, humans use palm-to-finger translation to retrieve the stored objects one by one with their fingers and places them at desired locations. These in-hand translation motions are essential for multi-object grasping in unstructured environments. Inspired by humans’ strategy, the research team introduced a gripper with in-hand translation capability. The gripper features fingers that can translate objects and a conveyor palm for storing multiple items simultaneously. The fingers, powered by two motors, grasp objects and transfer them to the palm. Decoupling links in the fingers kinematically separate the grasping and transferring motions, simplifying their control. The conveyor palm is designed as a pair of belts with elastic hairs embedded on their surfaces and actuated by a single motor. When the belts rotate, objects are inserted between the hairs, enabling the simultaneous storage and transfer of multiple objects.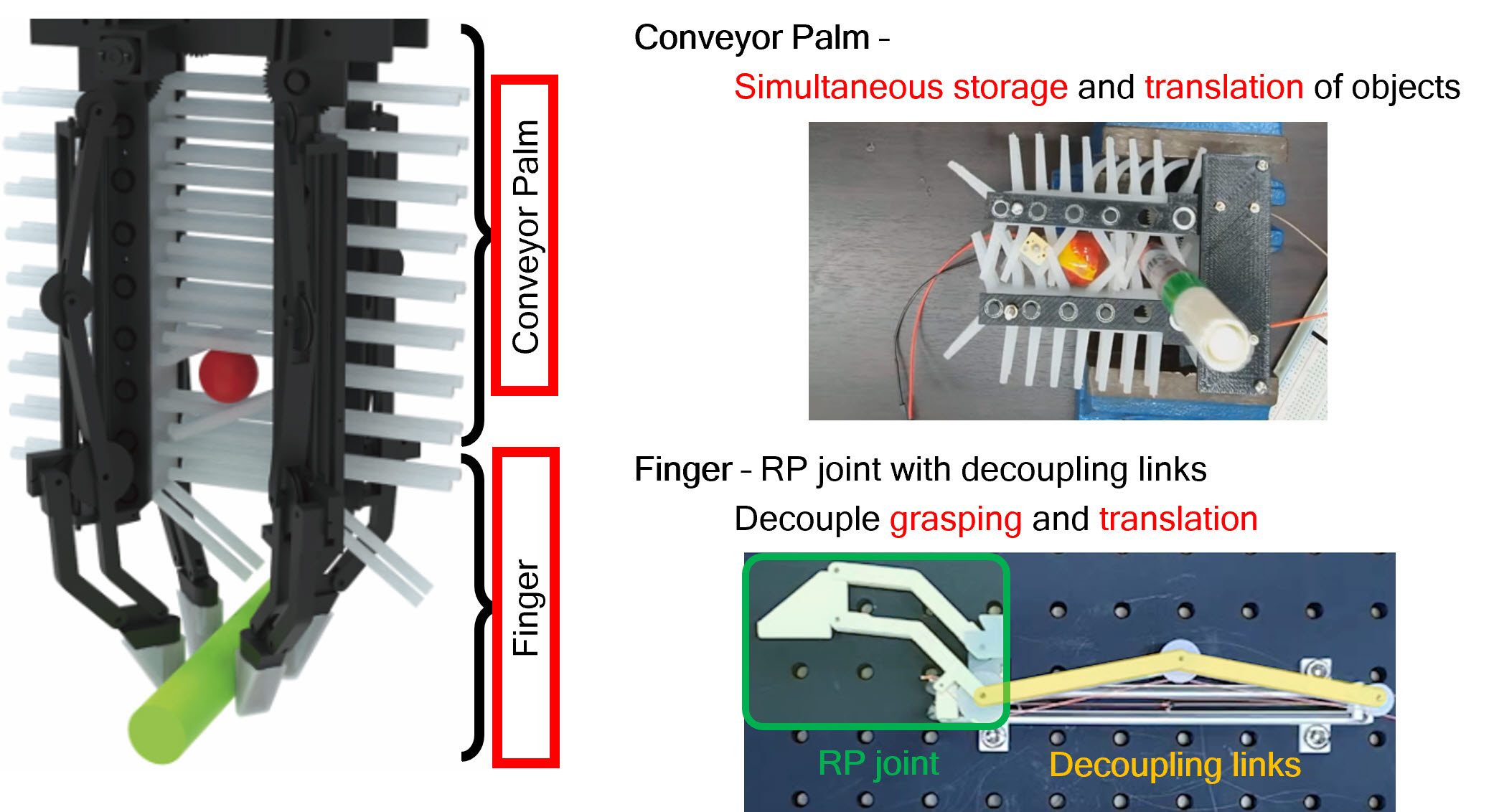
▲ (Figure 3) The design of the developed MOGrip : The developed gripper consisted of four fingers and a conveyor palm. The belt-shaped palm was made up of two conveyor belts with elastic hairs embedded on their surfaces, allowing for the simultaneous storage of multiple objects. The fingers were designed to grasp and translate individual objects. By applying two decoupling links, the grasping and translating motions were separated, enabling simple control to grasp objects and transfer them to the palm.
The research team demonstrated that the developed gripper (MOGrip) can be applied to various unstructured pick-and-place processes through lab-scale experiments. In a logistics environment, they showed that eight objects on a shelf could be transferred with just two reciprocating motions. Compared to single-object grasping, this reduced process time by 34% and the robotic arm’s travel distance by 71%. Additionally, in domestic setting, the gripper successfully stored all objects on a desk and placed them individually at desired locations. MOGrip is expected to be applicable not only in logistics and home environments but also in other unstructured tasks, such as bin-picking processes.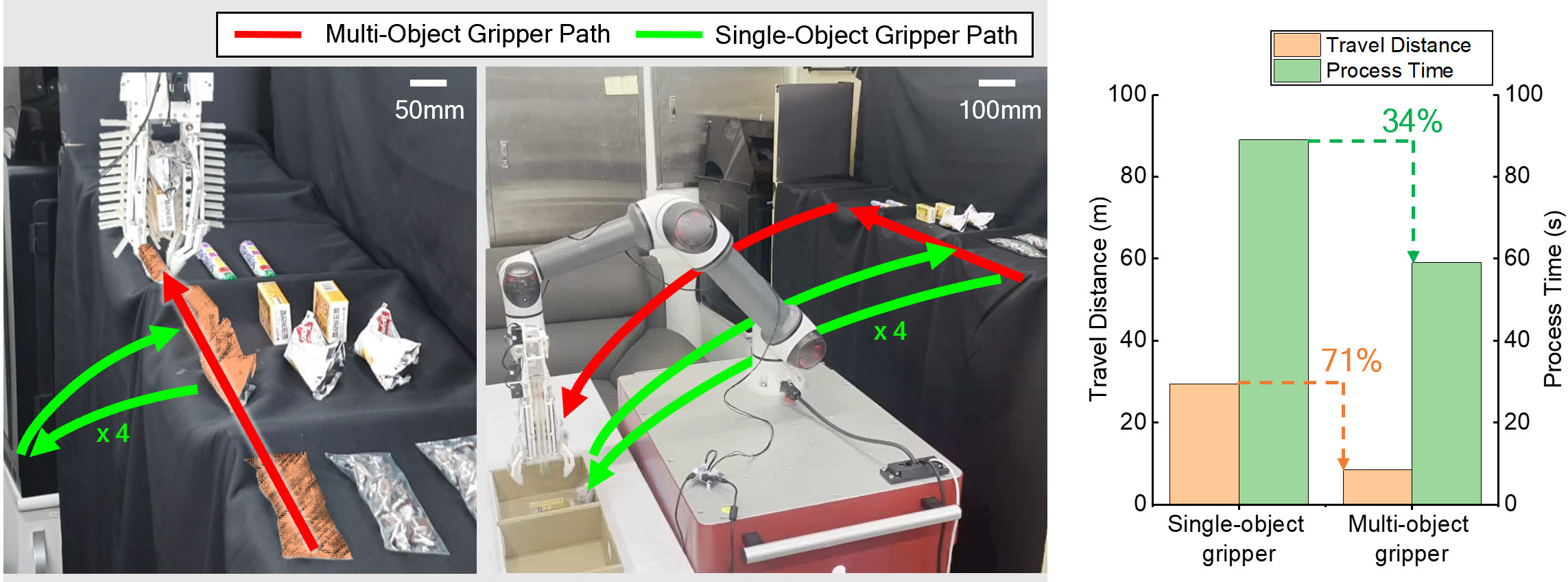
▲ (Figure 4) Efficiency comparison of multi-object grasping and single-object grasping in a lab-scale logistics environment : The developed multi-object grasping method reduced process time by 34% and the travel distance of manipulator by 71% compared to the conventional single-object grasping method.
Professor Kyu-Jin Cho, the lead researcher, stated, “The principles of nature provide inspiration for efficient robotic motion and actuation strategies. Finger-to-palm translation and palm-to-finger translations are a key component of the multi-object grasping strategy, and the developed gripper is the first example of applying this principle to a robot. It is expected to enable efficient pick-and-place operations in various unstructured environments, such as logistics and home settings.” Highlighting the significance of the study, he added, “The role of roboticists is not to simply mimic natural movements but to identify core principles and adapt them to robotic applications.”
Kyu-Jin Cho is also a director of Soft Robotics Research Center (SRRC).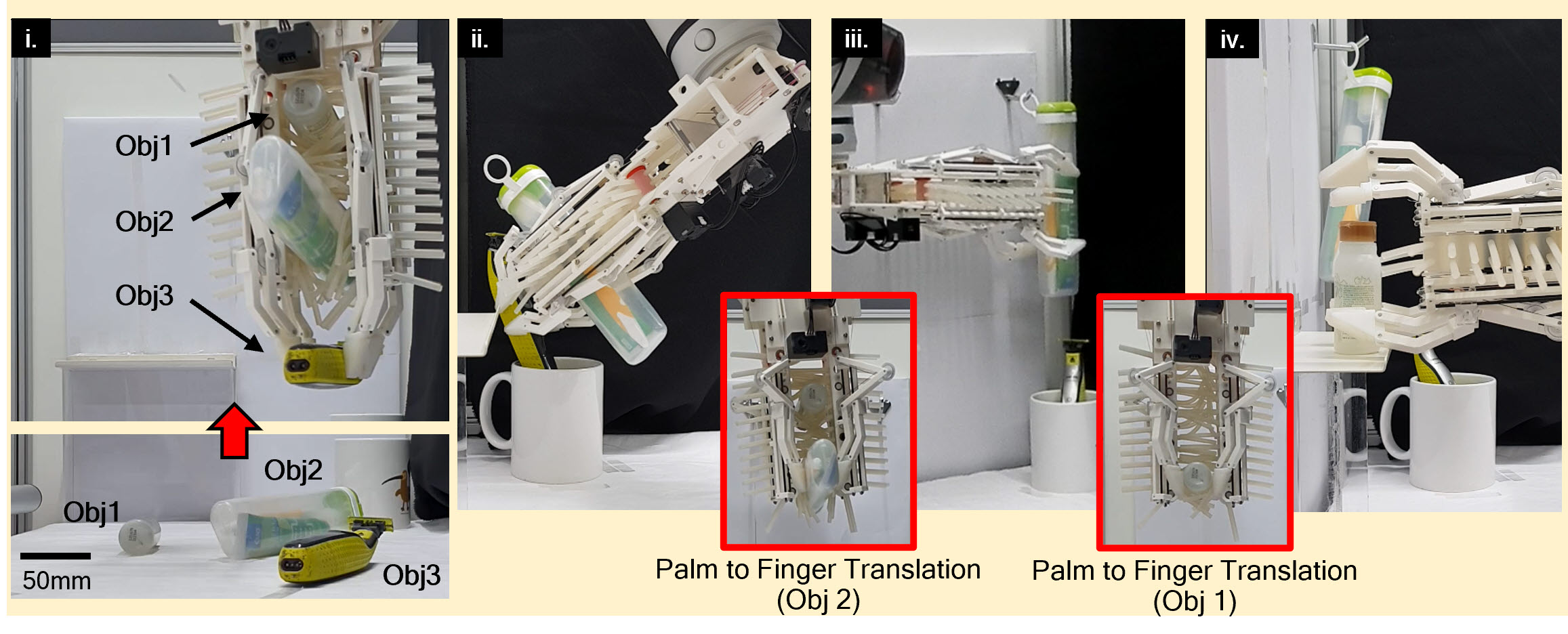
▲ (Figure 5) Home environment organization demonstration : The research team demonstrated that the developed MOGrip could store multiple objects, transfer them, and place them individually at desired locations.
This research was supported by the National Research Foundation of Korea (NRF) Grant funded by the Korean Government (MSIT) (RS-2023-00208052) (to K-J.C.), providing 80% of the total funding; and by the Korea Institute of Science and Technology Institutional Programs under Grant 2E33004 (to W.K.), providing the remaining 20%.
▲ (From left to right) Professor Kyu-Jin Cho(Correspondent Author), Ph.D. Candidate Jaemin Eom (first author), Ph.D. Candidate Sung Yol Yu
[Reference Materials]
● Paper
- “MOGrip: Gripper for multiobject grasping in pick-and-place tasks using translational movements of fingers”, Science Robotics
- https://www.science.org/doi/10.1126/scirobotics.ado3939
● Video (Youtube)
- Main Video: https://tinyurl.com/MOGrip-Media
- Sub Video: https://tinyurl.com/MOGrip-Sub
[Contact Information]
Prof. Kyu-Jin Cho, Department of Mechanical Engineering, Seoul National University / +82-2-880-1703 / kjcho@snu.ac.kr