loaction
- About
-
Academics
-
Undergraduate Programs
- Civil, Urban and Environmental Engineering
- Architecture and Architectural Engineering
- Mechanical Engineering
- Industrial Engineering
- Energy Resources Engineering
- Nuclear Engineering
- Materials Science and Engineering
- Electrical and Computer Engineering
- Naval Architecture and Ocean Engineering
- Computer Science and Engineering
- Aerospace Engineering
- Chemical and Biological Engineering
-
Graduate Programs
- Civil, Urban and Environmental Engineering
- Architecture and Architectural Engineering
- Mechanical Engineering
- Industrial Engineering
- Energy Systems Engineering
- Materials Science and Engineering
- Electrical and Computer Engineering
- Naval Architecture and Ocean Engineering
- Computer Science and Engineering
- Aerospace Engineering
- Chemical and Biological Engineering
- Interdisciplinary Program in Technology, Management, Economics and Policy
- Interdisciplinary Program in Urban Design
- Interdisciplinary Program in Bioengineering
- Interdisciplinary Program in Artificial Intelligence
- Interdisciplinary Program in Intelligent Space and Aerospace Systems
- Chemical Convergence for Energy and Environment Major
- Multiscale Mechanics Design Major
- Hybrid Materials Major
- Double Major Program
- Open Programs
-
Undergraduate Programs
- Research
- Prospective Students
- Campus Life
- International Office
- Communication
News
SNU Researchers Developed “Intelligent Artificial Muscle” Integrating Sensing and Actuation
-
Uploaded by
대외협력실
-
Upload Date
Apr 15, 2026
-
Views
945
SNU Researchers Developed “Intelligent Artificial Muscle” Integrating Sensing and Actuation
- Liquid crystal elastomer-based artificial muscle mimicking biological muscle
- Enables delicate manipulation and object property recognition when applied to robotic fingers and grippers
- Expected applications in humanoids, medical and rehabilitation robots, and soft robotics
▲ (Left) Yong-Lae Park, Professor, Department of Mechanical Engineering, Seoul National University; (Right) Jiyeon Cho, Researcher
Seoul National University College of Engineering announced that a research team led by Professor Yong-Lae Park from the Department of Mechanical Engineering has developed an “intelligent artificial muscle” capable of simultaneously performing sensing and actuation functions, inspired by biological muscle–tendon complexes.
This artificial muscle, which embeds liquid metal channels within a liquid crystal elastomer (LCE), contracts in response to electrical stimulation while also being able to measure internal force and length in real time. As a result, it enables the simultaneous processing of motor signals (somatic nervous system) and sensory signals (sensory nervous system), similar to biological muscles. The technology is regarded as a breakthrough with strong potential for application in next-generation humanoid robots.
The research findings were published in the prestigious international journal Advanced Materials and were also selected as a cover article.
▲ Artificial muscle-based robotic gripper (Advanced Materials, Vol. 3, No. 2 cover)
In recent years, there has been rapidly growing demand across industries—including humanoid robotics, logistics automation systems, and rehabilitation and assistive medical devices—for robotic actuation technologies capable of delicately manipulating objects, perceiving external environments, and interacting safely in a human-like manner.
However, conventional artificial muscles and robotic actuators have limitations because actuation and sensing functions are separated, requiring additional sensors and complex control systems. Consequently, there has been a continuous demand for a new class of “intelligent actuation materials” that can overcome these challenges.
To address this issue, Professor Yong-Lae Park’s research team developed an LCE-based artificial muscle that simultaneously integrates sensing and actuation functions, inspired by biological muscle–tendon complexes. The work is recognized as opening a new paradigm in robotic actuation through the realization of physical intelligence.
The artificial muscle consists of a single structure in which isotropic LCE and nematic LCE* with different material properties are connected in series, performing the roles of tendon and muscle, respectively. Among the two embedded liquid metal channels, one functions as an ակտիվ actuator (motor) that induces contraction through heating, while the other serves as a sensor that precisely detects force and deformation. The system is designed to sense the contraction state internally and generate motion simultaneously, without the need for external sensors.
* Isotropic refers to a state in which material properties are identical in all directions, whereas nematic refers to a state in which molecules are aligned in a specific direction. Accordingly, isotropic LCE exhibits similar properties regardless of direction, while nematic LCE can show greater deformation or response along the direction of molecular alignment.
The researchers also demonstrated that robotic fingers and gripper systems equipped with the artificial muscle can delicately grasp objects and distinguish their stiffness and size autonomously. In particular, by configuring two artificial muscles as an antagonistic pair operating in opposite directions, the system achieves precise control of contraction and relaxation, enabling fast and accurate actuation.
Professor Yong-Lae Park stated, “The artificial muscle developed in this study replicates the unique structure and function of biological muscles, enabling robots to interact with their surroundings in a more flexible and sensitive manner,” adding, “It is expected to find wide-ranging applications in humanoid robots, as well as in medical, rehabilitation, and soft robotics.”
Professor Park’s team is currently pursuing further research on structural optimization and active cooling technologies to enhance the cooling speed of the artificial muscle.
Jiyeon Cho, the first author of the paper, is currently a Ph.D. candidate in the Department of Mechanical Engineering at Seoul National University and is conducting follow-up research on the automated fabrication of artificial muscles. After completing her degree, she plans to continue her research as a postdoctoral researcher.
This study was conducted through a collaboration between Seoul National University and the University of California, San Diego, with support from the Ministry of Science and ICT and the National Research Foundation of Korea.
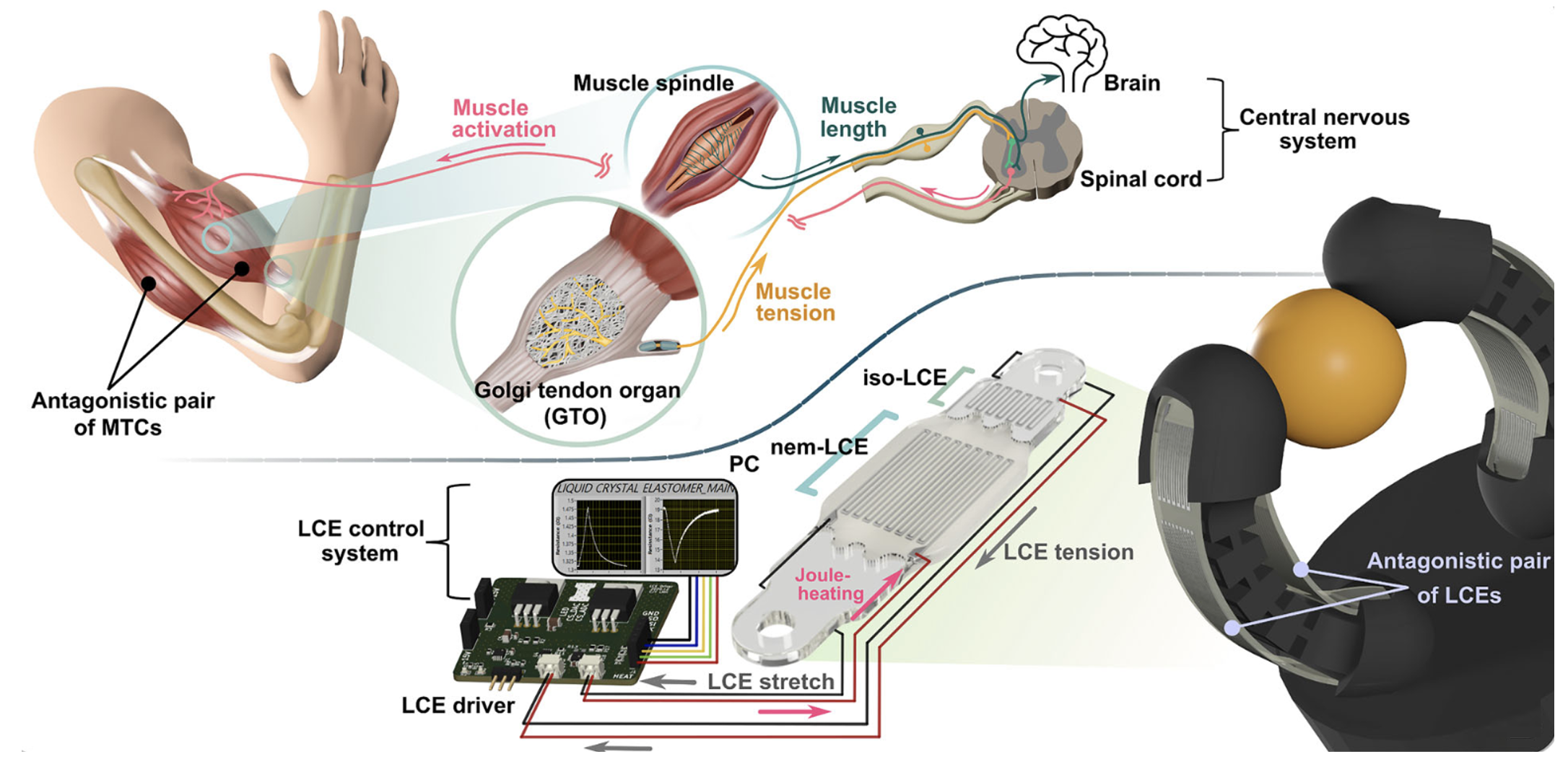
▲ Comparison of operating principles between biological muscle and artificial muscle (left), and a robotic hand equipped with artificial muscles (right)
[Reference Materials]
- Title/Journal : J. Cho, M. Kim, T. Park, Y. Yang, S. Cai, and Y.-L. Park, “"Bio-Inspired Artificial Muscle-Tendon Complex of Liquid Crystal Elastomer for Bidirectional Afferent-Efferent Signaling,” Advanced Materials, vol. 38, no. 2, e03094, 2026.
- DOI : https://doi.org/10.1002/adma.202503094
[Contact Information]
Prof. Yong-Lae Park, Department of Mechanical Engineering, Seoul National University / +82-2-880-1668 / ylpark@snu.ac.kr